



fig3
From: Load-adaptive shape sensing and control of a tendon-driven continuum robot actuated by SMA springs
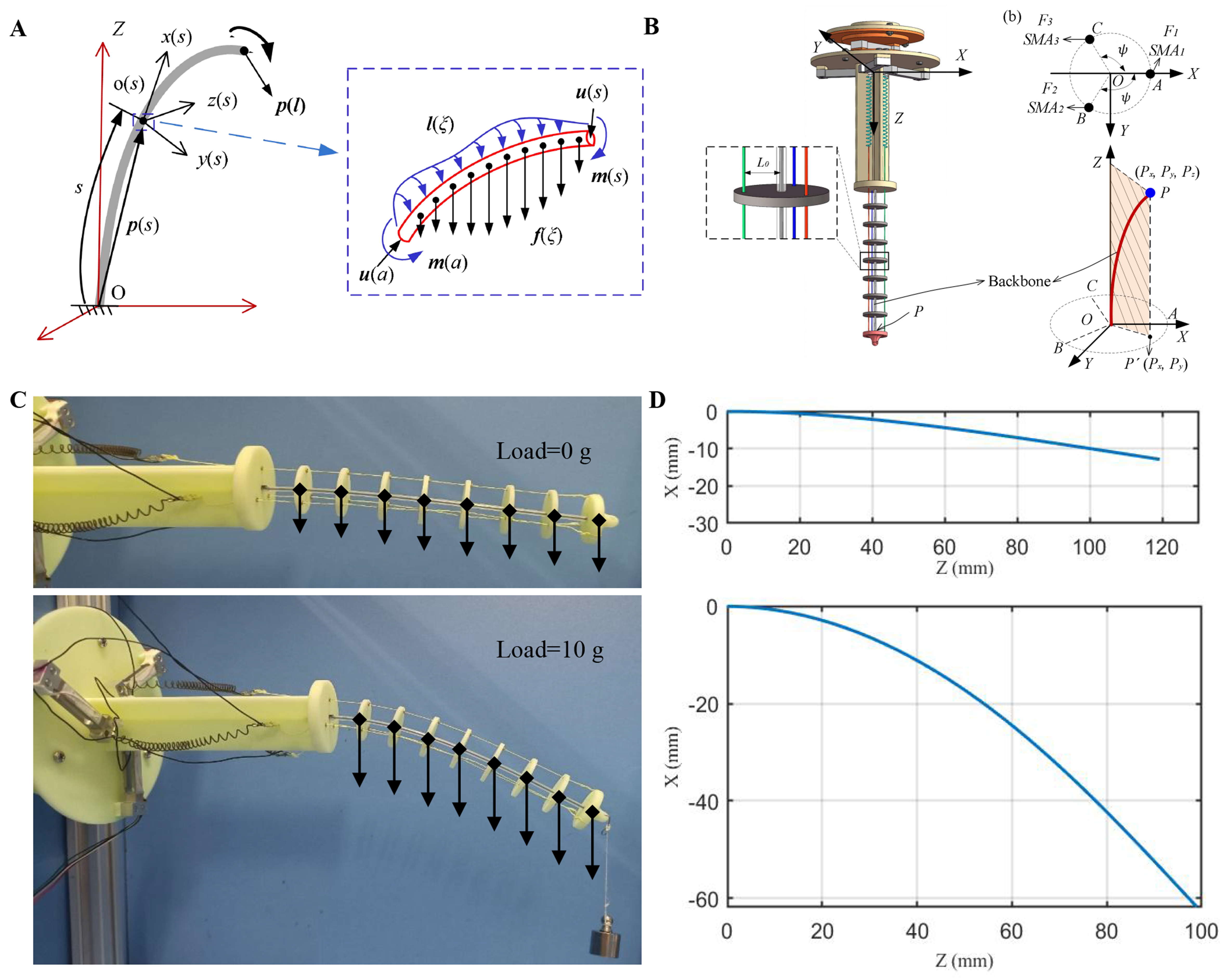
Figure 3. (A) Theoretical scheme based on the Cosserat model; (B) SMA actuation method based on inverse kinematics; (C) Continuous Robot Parameter Recognition Experiment; (D) Simulation of Continuous Robot Parameter Recognition. SMA: Shape memory alloy.





