



fig2
From: Load-adaptive shape sensing and control of a tendon-driven continuum robot actuated by SMA springs
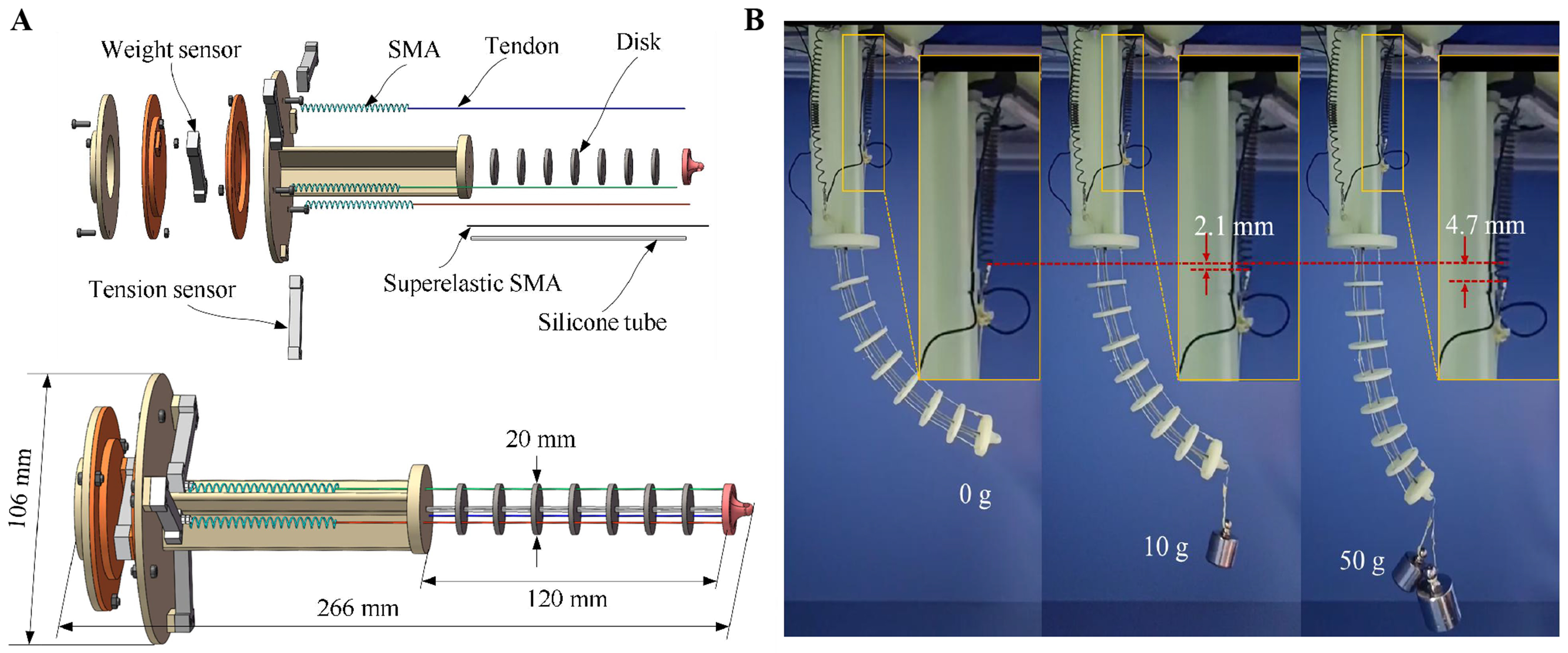
Figure 2. (A) 3D model of the continuum robot; (B) Adaptivity experiment with SMA. 3D: Three-dimensional; SMA: shape memory alloy.





