



fig11
From: Load-adaptive shape sensing and control of a tendon-driven continuum robot actuated by SMA springs
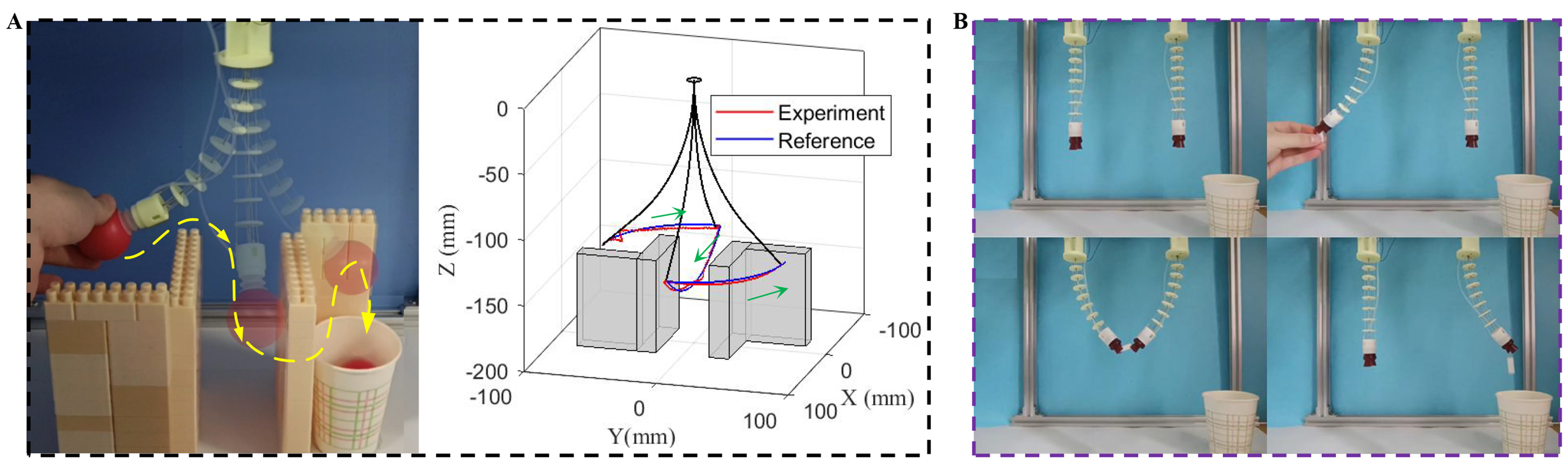
Figure 11. Object manipulation of robots. (A) Experiments and simulations of single robot; (B) cooperation of dual robots.
Figure 11. Object manipulation of robots. (A) Experiments and simulations of single robot; (B) cooperation of dual robots.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


