



fig2
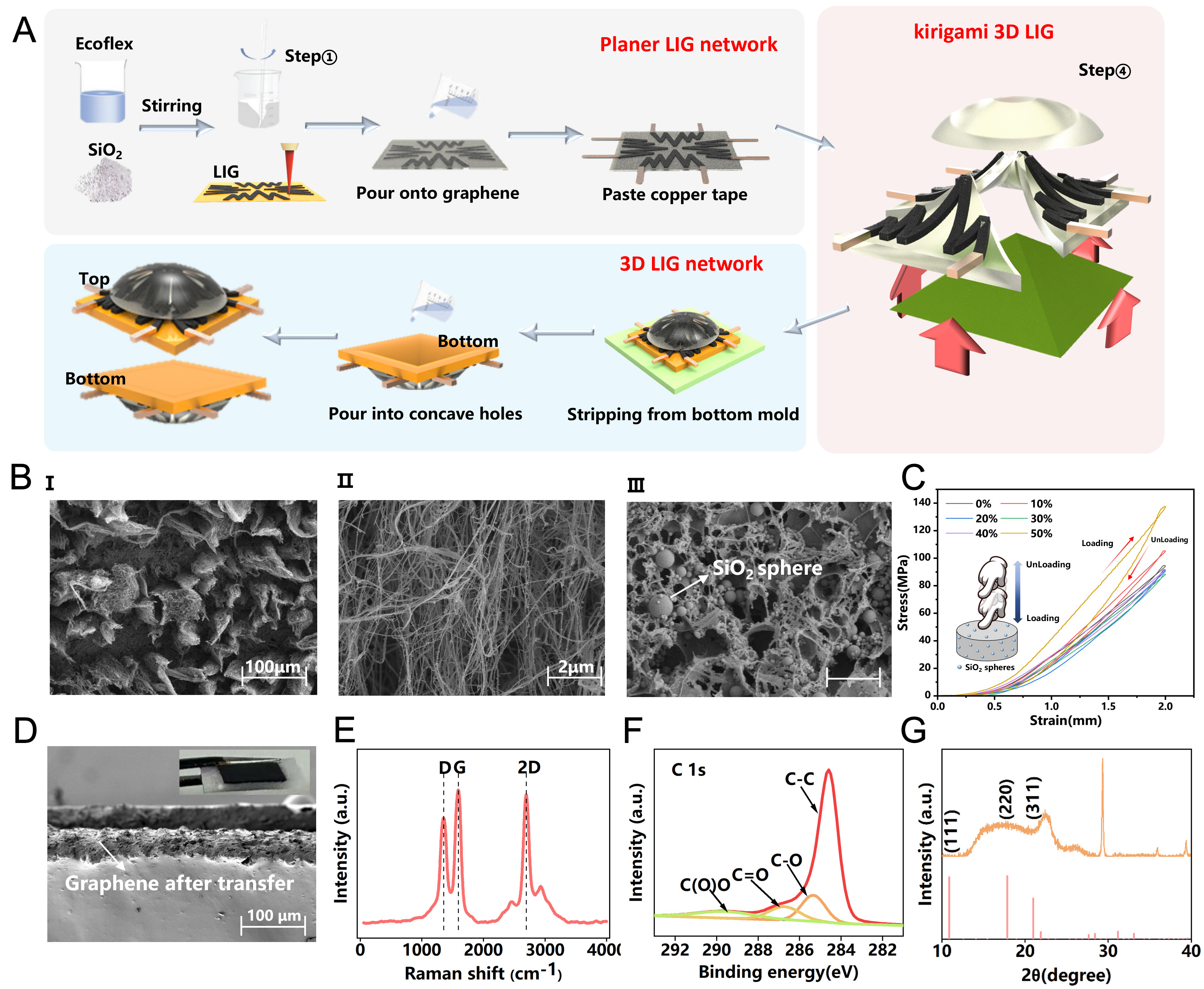
Figure 2. Fabrication process, microstructure, and material characterization of the skin-inspired flexible pressure sensor. (A) Schematic illustration of the sequential fabrication steps of the sensor; (B) SEM images of the laser-induced graphene (LIG) surface morphology, before and after deposition of SiO2 particles; (C) Optical image and SEM micrograph of graphene transferred onto the Ecoflex substrate; (D) The cross-sectional SEM image of the LIG interface after 3D transfer; (E) Raman spectrum of graphene, highlighting the characteristic D, G, and 2D peaks; (F) XPS spectrum of graphene, focusing on the C 1s peak and associated bonding states; (G) XRD pattern of graphene, showing diffraction peaks corresponding to its crystalline structure. 3D: Three-dimensional; 2D: two-dimensional; SEM: scanning electron microscopy; XPS: X-ray photoelectron spectroscopy; XRD:X-ray diffraction.





