



fig5
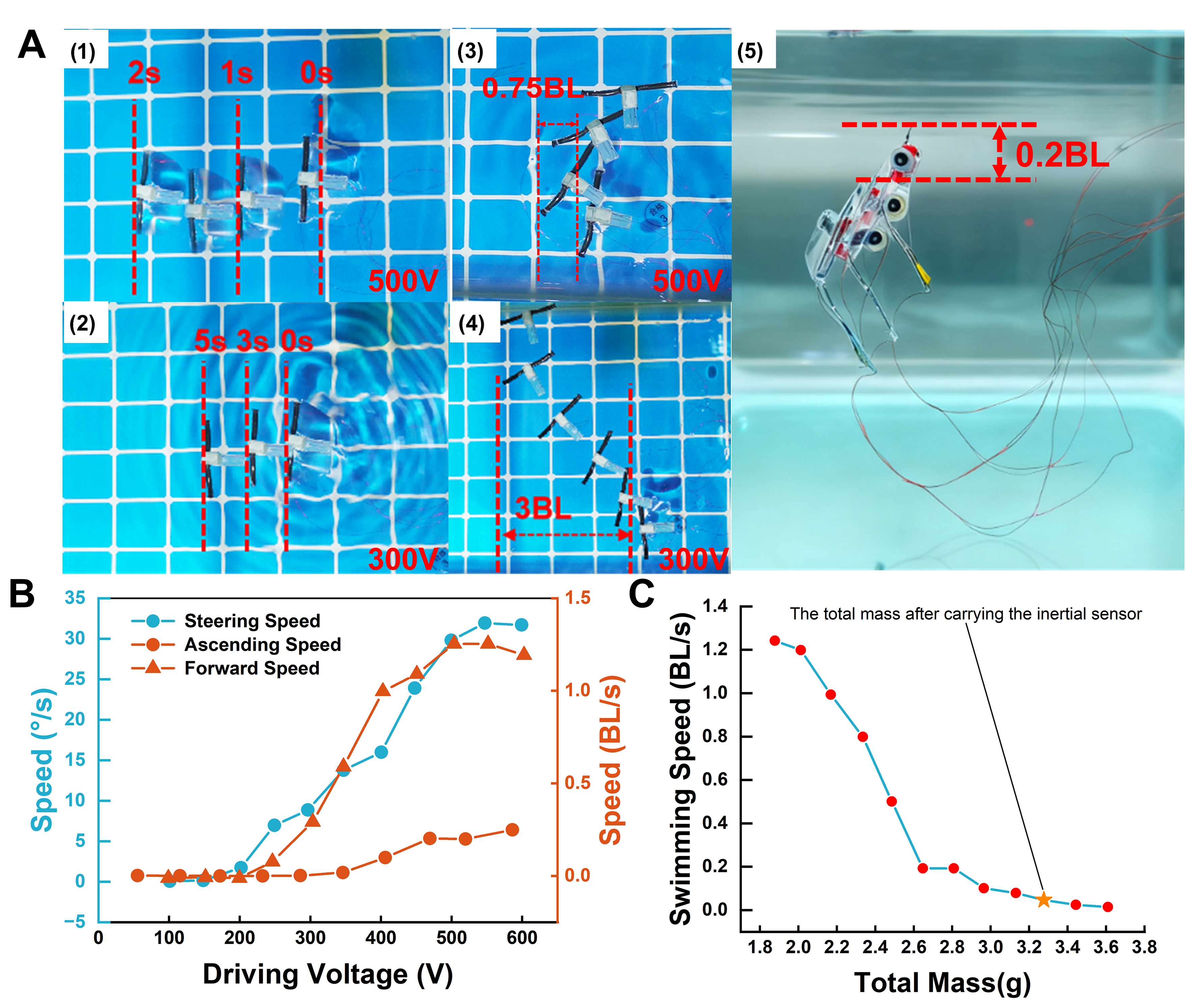
Figure 5. (A) Pictures of robotic fish during straight swimming, turning, and ascending under different voltages; (B) Performances of the robotic fish with different voltage; (C) Results of load experiment. Figure 5A was generated by superimposing the positions of the robotic fish at different time points based on video taken by the authors. BL: Body lengths.





