



Bioinspired magnetic soft gripper for rapid and non-injurious capture of deep-sea organisms
 0
0  ,
, Abstract
The rapid, flexible, and non-injurious capture and sampling of live organisms in deep-sea high-pressure environments is a critical component for establishing environmental baselines prior to deep-sea development operations. Here, we propose and fabricate a bionic multi-fingered magnetically driven soft gripper (MSG) designed for underwater grasping tasks. The gripper adopts a modular, bioinspired multi-finger structure composed of portable magnetic field actuator and high-pressure-resistant silicone elastomer with integrated surface microneedle arrays for enhancing contact friction. Remote, non-contact actuation and programmable deformation are achieved through an external magnetic drive system. The fabrication process, mechanical and magnetic characterization, flow disturbance analysis, magneto-fluid-structure coupling simulations, and grasping experiments on five representative underwater targets were systematically investigated. Structural response, control efficiency, and operational performance were comprehensively validated. Experimental results demonstrate that the MSG can complete expansion-contraction movements within 1 s and achieve high grasping success rates across diverse underwater organisms, with reliable, rapid, and damage-free manipulation. This research establishes a novel technological pathway for soft robotic grasping in underwater applications, offering both engineering value and scientific significance.
Keywords
INTRODUCTION
Since the beginning of the twenty-first century, Clarke has argued that deep-sea robotic platforms have become a cornerstone technology for exploring the planet’s “final frontier”, enabling long-duration, long-range, and high-risk deep-sea observations[1,2]. Advances in autonomous underwater vehicles (AUVs) have markedly improved the capability for long-term monitoring of ecological and physical processes in deep waters[3], while hybrid robotic systems have demonstrated adaptability and multi-functionality for multidisciplinary exploration of the ocean’s twilight zone[4]. Bioinspired legged designs have also been proposed to conduct low-disturbance surveys of seabed sediments and benthic habitats[5]. Collectively, these developments point toward an era of “precision operations in the deep sea”, in which intelligent and compliant end-effectors are key enabling technologies. Mechanical grippers remain a principal enabler for resource acquisition in underwater robotics, but the marine environment is highly complex and uncertain, and many targets of interest are fragile (e.g., jellyfish), slippery (e.g., sea cucumbers)[6] or irregular (e.g., mineral nodules)[7]. Conventional subsea manipulators are typically high-stiffness devices that exhibit low tolerance to contact uncertainties; as a result they can easily damage delicate specimens and are prone to failure in harsh underwater conditions[8].
Soft robots have gained increasing relevance in marine science and deep-sea exploration owing to their adaptability and low environmental disturbance. Gruber and Wood reviewed the advantages of soft robotics for biological sampling and environmental monitoring, and Laschi and Calisti demonstrated the potential of soft materials and control strategies for reaching extreme depths[9,10]. Bioinspired soft systems reported by Li et al. show excellent adaptability and fine manipulation capabilities suitable for deep-sea tasks[11]. Other groups have advanced shape-memory-alloy (SMA) actuated soft devices, highly reconfigurable modular soft robots, and small-scale deformable systems that adapt shape and locomotion modes to diverse underwater environments[12-14]. For instance, a jellyfish-inspired soft platform developed by Wang et al. exhibits efficient propulsion and precise control advantageous for fine manipulation tasks in cluttered underwater settings[15]. Consequently, the development of bioinspired, compliant end-effectors for safe, nondestructive underwater handling has become an urgent research priority.
Soft grippers attract substantial attention in the manipulation community due to their intrinsic compliance, superior shape conformance, and gentle interaction with fragile targets[16]. From precision electronics assembly to nondestructive agricultural harvesting, soft grippers have demonstrated broad application potential[17]. A variety of actuation modalities have been adapted for underwater soft grippers, with pneumatic and hydraulic schemes being the most widespread[18,19]. Notable examples are dexterous underwater soft manipulators combining multiple bending/extension segments and compliant grippers to perform multi degree of freedom (DOF), gentle manipulation of fragile and irregular biological targets[20-22], hydraulic soft grippers for delicate coral sampling at depths up to 800 m[23], and force-sensing soft end-effectors for tactile feedback[24]. Particle-based and variable-stiffness soft grippers have also been proposed to generate grasping forces via jamming mechanisms[25]. However, pneumatic systems require compressors and tubing, rendering them bulky and susceptible to pressure-induced performance loss at depth; hydraulic systems, while depth-insensitive and capable of larger forces[26], demand fluid lines and pose leakage-related contamination risks and increased system mass. Alternative actuators such as shape-memory alloys suffer from slow thermal response and limited cycle life[27]. In short, existing actuation paradigms entail trade-offs among response speed, system integration, and environmental compatibility, limiting their suitability for efficient, nondestructive subsea operations.
Magnetic actuation has recently emerged as a promising alternative to address these challenges[28-30]. Magnetically responsive soft materials-formed by embedding magnetic particles in an elastomeric matrix and actuating them with an external field-enable wireless, non-contact deformation of soft structures[31]. Kim and Zhao have noted that magnetic soft composites combine substantial deformability with remote, accurate control by applied magnetic fields[32]. Ebrahimi et al. further analyzed actuation strategies, showing that rotating fields enable continuous motion control, while gradient fields produce large-amplitude displacements and grasping actions[33]. Because magnetic interactions propagate effectively instantaneously, magnetic soft robots offer the potential for millisecond-scale response times[34].
Although magnetic actuation has yielded notable advances in targeted drug delivery and micro/nanoscale manipulation[35,36], its application to underwater, high-load, adaptive grasping remains nascent. Existing research, such as the magnetically driven origami gripper developed by Kim et al.[37], has shown good variable stiffness characteristics, but its complex origami structure is prone to fatigue failure underwater; Li et al. reported a porous magnetically driven flexible gripper, which increases the friction force during gripping through the porous structure on the gripper surface, and realizes easy gripping of diverse targets[38]. Recent contributions include an octopus-inspired magnetic soft gripper capable of crawling and swimming[39], comprehensive reviews emphasizing magnetic actuation for adhesion and grasping[40], and cable-free magnetic soft actuators that enhance operational autonomy[41]. Programmable internal magnetization schemes have permitted complex bending and twisting behaviors in small-scale devices[42,43]. Despite these advances, most magnetic grippers reported to date have focused on regular objects; studies addressing fragile, slippery or highly irregular underwater targets are comparatively scarce. Thus, designing a magnetic soft gripper that combines rapid response, high reliability, and robust environmental adaptability for diverse underwater targets remains a significant challenge. Motivated by this gap, we developed a bioinspired, multi-finger magnetically driven soft gripper (MSG) featuring cilium-like microneedle surfaces, specifically targeted at underwater resource acquisition tasks.
In addition to the above studies, this work introduces several new strategies and directions for MSG research. Quantitative materials-actuation trade-off methodology. By systematically comparing Ecoflex0020/NdFeB composites with different magnetic-filler mass fractions (e.g., 50 wt% vs. 60 wt%) in terms of Young’s modulus, surface remanence, and key gripper performance metrics (response time, normalized surface-roughness index, grasping success rate, etc.), we established quantitative relationships between material composition and both the dynamic and static performance of the gripper. Using these quantified relations, we performed a comprehensive assessment of grasping efficiency and non-destructiveness across compositions, yielding practical design guidelines for selecting a magnetic-powder mass fraction that balances “fast response” and “reduced biological damage risk”, and providing an empirical basis for subsequent material and structural optimization of MSGs. Biomimetic microneedle surface treatment as a novel solution to improve underwater contact friction. Friction tests comparing surfaces with and without microneedles showed that cilia-like biomimetic microneedles significantly increase interfacial friction and anti-slip capability. From an engineering perspective, the results validate that a microneedle surface can enhance grasp stability for smooth or slippery targets, demonstrating broad potential for underwater robotic applications[44]. Decoupled analysis framework for deep-sea environmental effects. To increase the relevance of this research to deep-sea deployment, we developed a framework that isolates the effects of hydrostatic pressure and low temperature, and we validated MSG performance via hydrostatic high-pressure and low-temperature grasping tests. The experimental results indicate that under extreme single-factor conditions (high pressure or low temperature), the gripper’s structural integrity and key functional metrics does not exhibit significant degradation, providing preliminary technical evidence to support future engineering deployment under more complex combined high-pressure/low-temperature conditions.
This manuscript details the gripper’s biomimetic design, materials processing and characterization, actuation principles, performance comparisons, numerical simulations, experimental protocols, and fabrication methods, and concludes with a discussion of the work and directions for future research. It offers systematic methodologies and experimental/numerical validation in material-ratio quantification, surface-friction enhancement, and deep-sea adaptability assessment, thereby providing actionable research pathways and reference benchmarks for the further development and optimization of MSGs for deep-sea sample collection and related marine engineering applications.
EXPERIMENTAL
The core contributions of this work are as follows: (1) design and fabrication of a modular, bioinspired multi-finger MSG, whose fingers are assembled from customized Ecoflex0020/NdFeB composite modules to achieve both strong magnetic responsiveness and mechanical compliance; (2) integration of biomimetic microneedle arrays on the gripping surfaces to increase interfacial friction underwater, thereby overcoming surface water films and mucous coatings that otherwise reduce grip stability; and (3) comprehensive validation through material characterization, magneto-fluid coupling simulations, and underwater grasping experiments. Fabrication of the MSG: the MSG consists of several modular components, and its fabrication involves three main steps.
Preparation of the magnetic matrix: Two parts of Ecoflex0020 silicone (parts A and B) were mixed at a mass ratio of 1:1, followed by the addition of NdFeB microparticles (400 mesh, 35-45 μm) at a filler fraction of
Fabrication of the microneedle surface: The same silicone slurry formulation, after degassing, was cast into a customized microneedle mold to fully fill the cavities. The pre-cured gripper modules were gently pressed against the mold, ensuring tight contact between their surfaces and the microneedle slurry. The assembly was then cured together at 50 °C for 5 h. After curing, the excess material was trimmed, resulting in soft gripper modules with integrated microneedle structures.
Magnetization and module assembly: Each module was subjected to pulsed magnetization using a magnetizer, where a 2.5 T pulse magnetic field was applied to magnetize the embedded NdFeB particles to saturation, with the magnetization direction oriented toward the microneedle tips. Finally, the magnetized modules were assembled and fixed together via an internal skeleton and interlocking bolts, completing the fabrication of the MSG.
Sources of experimental reagents and instruments. Reagents: Ecoflex0020, purchased online, manufactured by Smooth-On Inc. (USA); NdFeB powder (400 mesh), purchased online, manufactured by Hebei Chaoyue Metal Alloy Materials Co., Ltd. Instruments: Vacuum drying oven, purchased online, manufactured by Jiecheng Experimental Instruments Co., Ltd.; Data acquisition (DAQ) card, custom-ordered online, manufactured by Art Technology Co., Ltd.; power amplifier, custom-ordered online, manufactured by Harbin Zhinaxin Technology Co., Ltd.; robotic arm, purchased online, manufactured by Realman Intelligent Technology Co., Ltd.; 3D printer, purchased online, manufactured by Bambu Lab; DC power supply and digital multimeter, purchased online, manufactured by ITECH Electronics Co., Ltd.; magnetometer, purchased online, manufactured by ADEX Instruments Co., Ltd.; sealed high-pressure chamber, custom-fabricated, manufactured by Shenzhen Dinghai New Materials Technology Co., Ltd.
All images were created using COMSOL, Solidworks, PowerPoint, Origin and Premiere Pro.
RESULTS AND DISCUSSION
Design rationale, application scenarios and actuation principle of the MSG
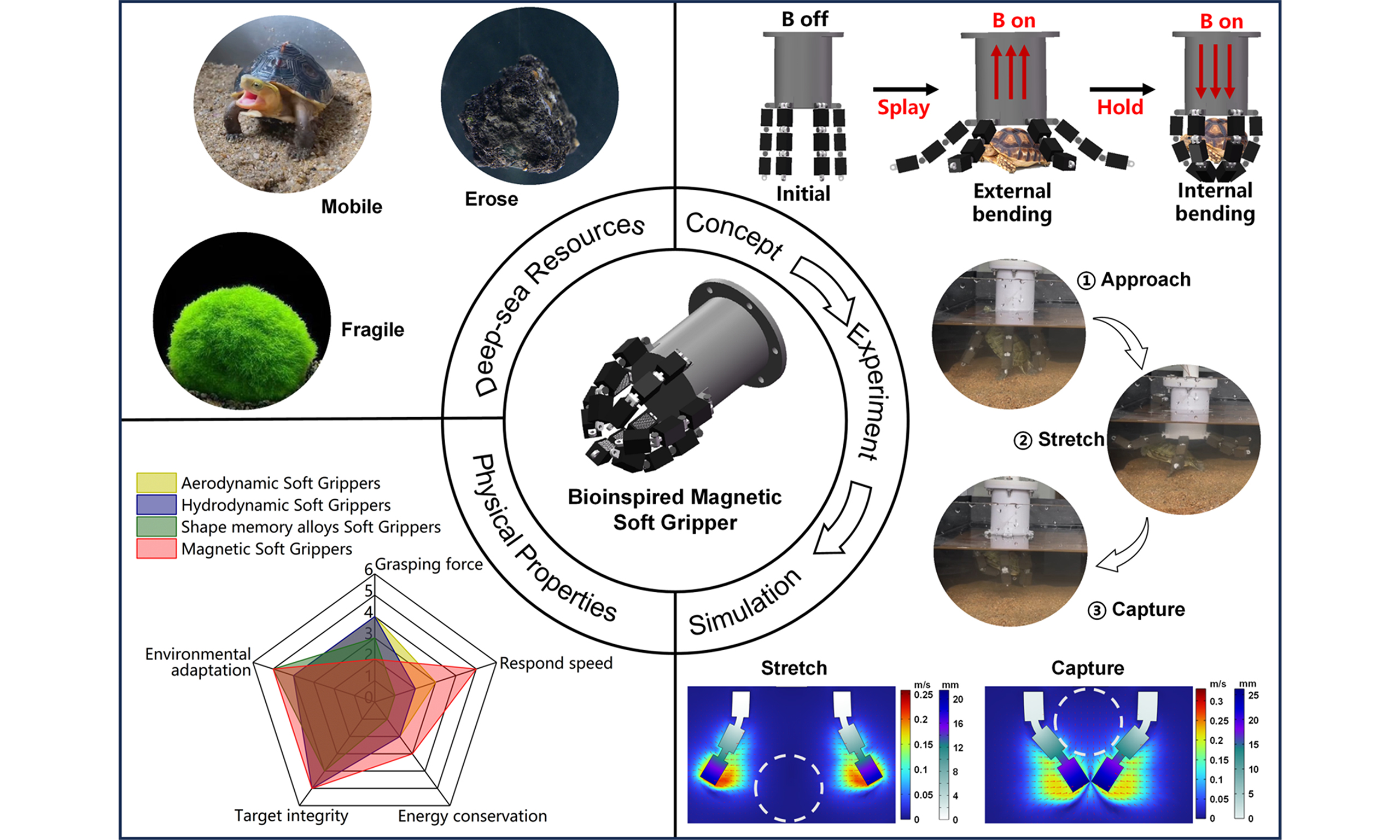
Soft actuators, particularly soft grippers, have shown great promise for underwater inspection, biological sampling, and resource collection. Conventional rigid manipulators or soft grippers driven by tethered pneumatic/hydraulic systems commonly suffer from slow response, bulky hardware, the risk of damaging delicate targets, and potential leakage/pollution in complex subsea environments. Magnetic soft grippers offer an effective alternative to these approaches due to their non-contact actuation, rapid response, structural simplicity, and environmental compatibility. Focusing on operation in complex underwater settings, this study proposes and designs a novel MSG [Figure 1] aimed at safe, efficient, and non-destructive grasping of marine organisms (e.g., fragile flora and agile fauna) as well as morphologically irregular deep-sea mineral nodules (e.g., polymetallic nodules). As illustrated in Figure 1A, the diversity of target properties-fragility, mobility, and irregular geometry-places stringent demands on gripper adaptability, compliance, and grasp stability. The core concept is to exploit remotely applied magnetic fields to induce precisely controlled deformation of soft structures, thereby avoiding the limitations associated with physically tethered actuation.
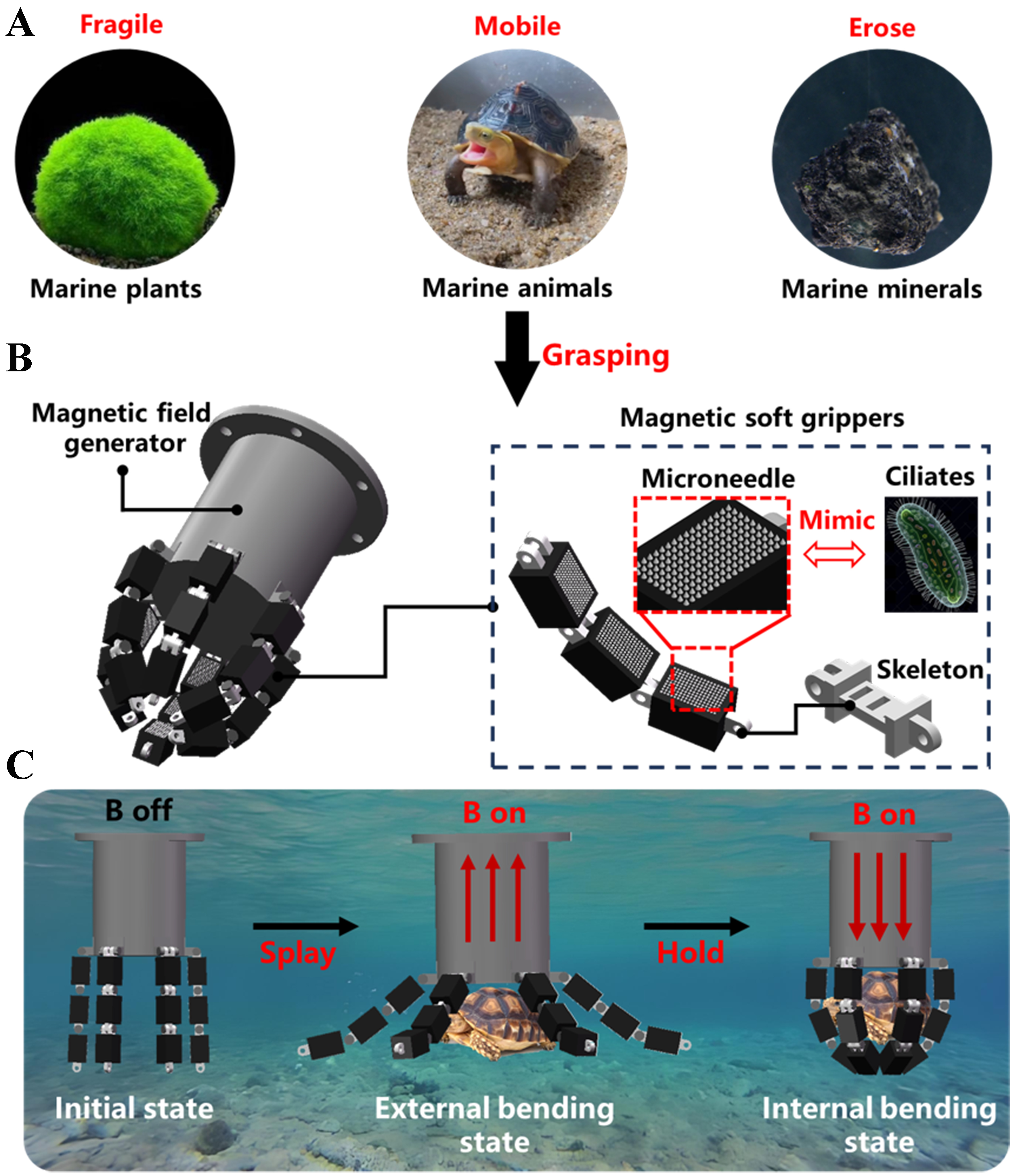
Figure 1. Design and characteristics of the MSGs. (A) Representative target objects for underwater grasping and their intrinsic characteristics; (B) Overall design of the grippers and its modular configuration; (C) Actuation scheme of the MSG. MSGs: Magnetically driven soft grippers.
The gripper body adopts a modular, bioinspired multi-finger architecture [Figure 1B], where each finger is assembled from a series of serially connected modules. Each module comprises three principal elements: (1) a magneto-responsive matrix consisting of a soft silicone elastomer (e.g., Ecoflex0020) embedded with high-performance NdFeB particles, which senses external magnetic fields and produces the active deformation; (2) an internal skeleton that links adjacent modules and provides necessary load-bearing support (analogous to a biological bone), ensuring structural integrity under external loads while allowing the magnetic matrix to remain conformal to the skeleton; and (3) biomimetic ciliate-like microneedle arrays distributed on the contact surface to increase surface roughness and friction. The microneedle surface is especially important for overcoming underwater lubrication effects-such as mucous coatings and water film-thereby improving grip reliability and slip resistance.
The actuation system is based on an externally controlled electromagnetic field [Figure 1C]. By precisely programming the coil current (magnitude and polarity), a spatially tunable field and gradient can be generated around the gripper. The external field interacts with the embedded NdFeB particles to induce magnetic moments and to apply magnetic forces and torques, driving controllable bending deformations (opening/closing) of the soft modules. This actuation paradigm brings several key benefits: remote, non-contact control that eliminates physical connections (e.g., hydraulic lines or pneumatic tubing) and thus mitigates sealing and leakage failures-an advantage for confined, high-pressure, or contamination-sensitive subsea operations; millisecond-scale theoretical response enabled by the near-instantaneous transmission of magnetic fields, outperforming fluidic or thermally driven systems for capturing fast-moving organisms; high system integration and low end-effector mass, since the coils may be mounted externally or on the carrier vehicle while the gripper itself contains only soft material and magnetic filler; and fine programmable control over deformation amplitude, speed, and shape, allowing adaptation to objects of varying size, geometry, and mechanical properties. Experimental results show that the MSG can complete an underwater grasping action within 0.4 s, and can rapidly, safely, and reliably capture five representative targets, including live turtles (mobile organisms), algal balls (fragile organisms), and irregular mineral samples, and all experiments involving live animals were conducted with institutional animal care and use approval (Approval No. 25-YS-092). Motivated by this gap, we developed a bioinspired, multi-finger MSG featuring cilium-like microneedle surfaces, specifically targeted at underwater resource acquisition tasks.
In summary, the modular MSG design presented here-combining a biomimetic multi-finger structure, magnetic actuation, and microneedle-enhanced contact surfaces-provides a foundational approach for rapid, safe, and highly adaptive underwater grasping. Its non-contact operation, fast dynamic response, and lightweight simplicity constitute the principal advantages over conventional solutions. To verify the practical performance of this concept, the following section details the material fabrication protocol and presents systematic material characterizations (mechanical, magnetic, and frictional) to quantify how key design parameters (e.g., magnetic filler loading and microneedle geometry) affect gripper compliance, magnetic responsiveness, and interfacial friction, thereby providing the basis for subsequent experimental validation.
Fabrication process and material performance of the MSG
Based on the core objective of achieving rapid underwater response and high adaptability in grasping, the performance of magnetically actuated flexible grippers is highly dependent on the magneto-mechanical coupling characteristics of the material system. Previous studies in the field of magnetically driven soft robotics have demonstrated that the dispersion, filling ratio, and magnetization strength of magnetic particles within the elastomeric matrix are critical factors influencing actuation efficiency, mechanical flexibility, and fatigue life[45,46]. Accordingly, this section systematically introduces the formulation and processing of Ecoflex0020/NdFeB composites and verifies their underwater applicability through multiscale characterization.
The fabrication process of the flexible gripper is illustrated in Figure 2A, comprising four steps: molding of the main body, construction of microstructural needle surfaces, magnetization, and modular assembly. Ecoflex0020 silicone elastomer was selected as the matrix material due to its excellent elasticity and biocompatibility, ensuring stability and safety in underwater environments. The magnetic filler consisted of NdFeB particles (400 mesh), providing sufficient magnetic responsiveness. The molds were fabricated using 3D-printed PLA, ensuring structural precision and reproducibility. During the micro-needle fabrication step, customized molds (conical micro-needles, height: 500 μm, density: 180 needles/cm2) were employed to generate structured distributions on the gripper surface, thereby enhancing surface friction and adaptability to biological objects. Finally, the single modules were magnetized using a pulsed magnetic field of 2.5 T and assembled mechanically.
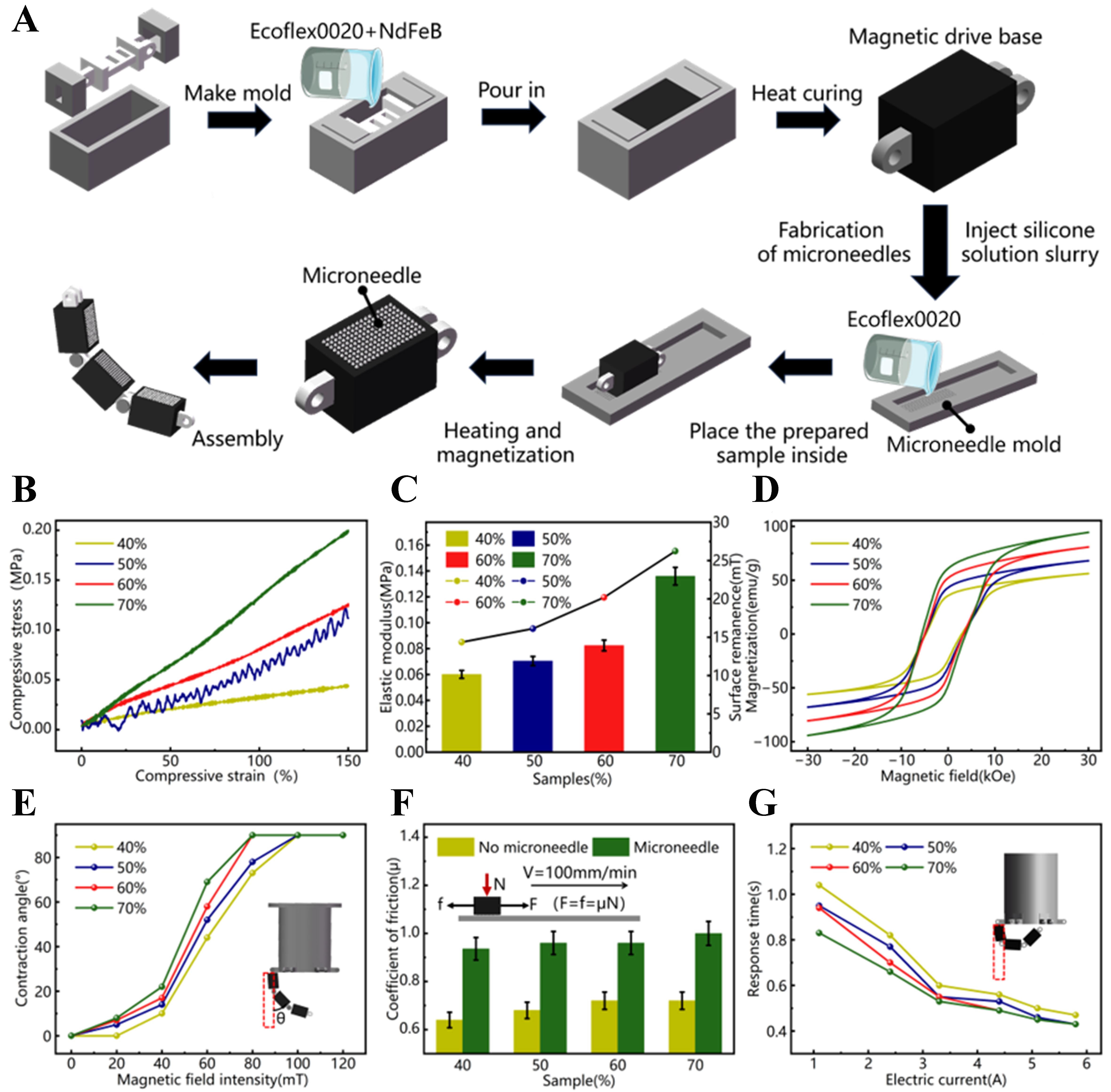
Figure 2. Fabrication process and performance characterization of the soft gripper. (A) Fabrication steps of the MSG, showing the preparation of Ecoflex0020/NdFeB composites, modular assembly, and integration of micro-spine structures; (B) Stress-strain curves of four different gripper samples; (C) Young’s modulus and surface remanence of samples with different mass fractions; (D) M-H curves of samples with different mass fractions measured as the magnetic field was swept from -30 to 30 kOe; (E) Bending angles of grippers with different mass fractions under varying magnetic fields; (F) Friction performance (normalized friction coefficient) of samples with and without micro-spines under a 35 g (0.343 N) preload; (G) Response time of soft grippers with varying particle loadings under different driving currents, defined as the time required for the second segment to reach a bending angle of 90° from the initial state. MSG: Magnetically driven soft gripper; M-H curves: magnetization (M) vs. magnetic field (H) curves.
To validate whether the fabricated grippers met the desired actuation performance, samples were subjected to a series of physical property tests, including mechanical characterization (stress-strain behavior, Young’s modulus), magnetic response [magnetization (M) vs. magnetic field (H) curves (M-H curves), bending angles under magnetic fields], and surface friction performance of the micro-needles. As shown in Figure 2B, the stress-strain curves of four gripper samples with different NdFeB weight fractions under 0%-150% strain revealed that samples with higher NdFeB content exhibited smaller strain under the same stress, indicating reduced flexibility compared to samples with lower filler content. Figure 2C shows the variation in Young’s modulus and surface remanence with increasing NdFeB weight fraction. Since Young’s modulus reflects material stiffness, samples with higher filler content exhibited stronger rigidity, which could potentially induce excessive impact and damage when grasping underwater objects. Notably, the 70 wt% samples displayed a significantly higher modulus than the other three compositions. The test results indicate that, as the mass fraction of NdFeB increases, the samples’ surface remanent magnetization progressively grows. Increased surface remanence enhances the MSG’s magnetic actuation force within the magnetic-drive system, thereby directly increasing the MSG’s payload capacity. Consequently, when designing MSG materials, a trade-off must be carefully considered between improving magnetic responsiveness and preserving the required flexibility. We acknowledge that the Ecoflex0020/NdFeB composite exhibits time-varying inelastic behavior (Mullins-type cyclic softening, rate dependence, and creep/relaxation), which may affect the dynamic actuation response of the gripper during grasping. Due to instrument limitations and project schedule constraints, only quasi-static elastic characterization is reported. However, the event-varying inelastic behavior of the material cannot be ignored; therefore, we present a complete experimental protocol for subsequent experiments, with the planned tests as follows: Mullins Cyclic Testing. N = 50 cycles are performed between peak engineered strain εmax = 20% and 0%, at a nominal strain rate of 10%/s; the cycles are also repeated at εmax = 10% and 30% to probe amplitude dependence. Measurement outputs: Tangent modulus Et(c), residual strain, and hysteresis energy Wh(c) per cycle. Sample size n ≥ 3/cycle. Depth-depth rate [dynamic mechanical analysis (DMA)] Testing. DMA (shear or tensile modes), frequency sweep f = 0.1-50 Hz, small strain amplitude 0.5%-2%, temperature points including 25 and 5 °C (approximate deep-sea temperature). Outputs: Storage modulus E′(f), loss modulus E′′(f), tan δ(f). Sample size n ≥ 3. Creep: Apply a constant stress σ0 and record the strain evolution over time (time domain recording recommended 102-104 s). Figure 2D presents the M-H curves of the four samples, which reflect the magnetization behavior under external magnetic fields and the remanent magnetization after field removal. The remanence determines the gripper’s response speed to magnetic actuation. It is evident that higher NdFeB content leads to stronger remanence. Figure 2E illustrates the bending responses of the grippers under different magnetic field strengths, quantified as the bending angle of the second joint module. Experimental results confirm that the magnetized grippers responded effectively to the electromagnetic coil fields, and grippers with higher NdFeB fractions achieved larger bending angles under the same magnetic field, more readily reaching the maximum deflection of 90°.
Figure 2F compares the normalized surface friction coefficients of samples with and without micro-needles under a normal load of 35 g (0.343 N) during linear sliding (100 mm/min) against a PLA plate. The friction coefficient directly influences grasping force, which in turn affects the payload capacity and success rate of grasping tasks. Results show that the micro-needle structures significantly enhanced surface friction. Specifically, for the 60 wt% samples, the friction coefficient without micro-needles is 0.72 (normalized), while the presence of micro-needles increased it to 0.96, representing a 25% enhancement.
Figure 2G illustrates the mass fraction of magnetic powder inside the gripper and the influence of the electromagnetic coil’s magnetic field on the gripper’s retraction speed. Using the time required for the second section of the gripper to bend and retract to 90° as a criterion, the retraction speed of the gripper significantly increases with the gradual increase of the electromagnetic coil current. Furthermore, the content of magnetic powder inside the gripper also significantly affects the retraction speed. When the current reaches 6 A, the retraction time is less than 0.5 s. The retraction performance demonstrates that the magnetically driven flexible gripper in this study possesses rapid response capabilities. Therefore, it can quickly wrap around the target and complete the gripping task during operation, exhibiting superior performance compared to flexible grippers driven by traditional methods.
Taken together, the characterization results indicate that the 60 wt% samples offered an optimal balance: Comparing samples with magnetic-powder mass fractions of 50 wt%, 60 wt%, and 70 wt%, we measured Young’s modulus and surface remanence and obtained the following trends: relative to the 50 wt% sample, the 60 wt% sample exhibited an increase in Young’s modulus of approximately 17% and an increase in surface remanence of approximately 25.3%; compared with the 60 wt% sample, the 70 wt% sample showed an increase in Young’s modulus of approximately 65% and an increase in surface remanence of approximately 29.9%. These results indicate that increasing the magnetic-powder content from 50 wt% to 60 wt% yields a relatively pronounced gain in magnetic properties, resulting in greater magnetic responsiveness; however, further increasing the filler content to 70 wt% leads to a substantially larger rise in material stiffness than in surface remanence. The above findings suggest that, in the design of MSGs, a trade-off between magnetic responsiveness and compliance must be considered in order to determine an optimal magnetic-powder mass fraction that balances actuation performance and deformability. Thus the 60 wt% composition successfully balanced magnetic responsiveness, structural flexibility, and surface friction, establishing a solid material basis for subsequent performance validation. Furthermore, the effectiveness of the study and the feasibility of the gripper were verified by testing the gripper’s contraction and bending angle, the frictional properties of the gripper surface, and the gripper’s response speed. In the following section, flexible grippers fabricated with 60 wt% NdFeB will be systematically compared with conventional flexible grippers to further highlight the engineering value of this design.
Key characteristics of the MSG and stability of the MSG performance
Building on a 60 wt% NdFeB composite formulation, this section highlights the MSG’s advantages in dynamic response, target adaptability and environmental compatibility. Through systematic experiments and comparison with literature data, we validate the MSG’s comprehensive performance in complex underwater scenarios.
The principal advantage of the proposed MSG over conventional soft grippers is its rapid actuation. Even under water, the MSG’s response speed substantially exceeds that of traditional driving methods. Figure 3A compares the device response in air and in water under a coil current of 6 A. The test protocol comprised an expansion phase followed by a contraction phase: from t = 0 the gripper expanded and held the open configuration for 3 s, power was then removed, and after 2 s the current polarity was reversed to trigger contraction, which was maintained for 2 s. In air the gripper completes the response in 0.2 s; viscous resistance in water delays the response somewhat, but a full response is still achieved within 0.4 s markedly faster than conventional actuation schemes[47]. Such high-speed actuation increases the probability of successful capture of agile underwater organisms.
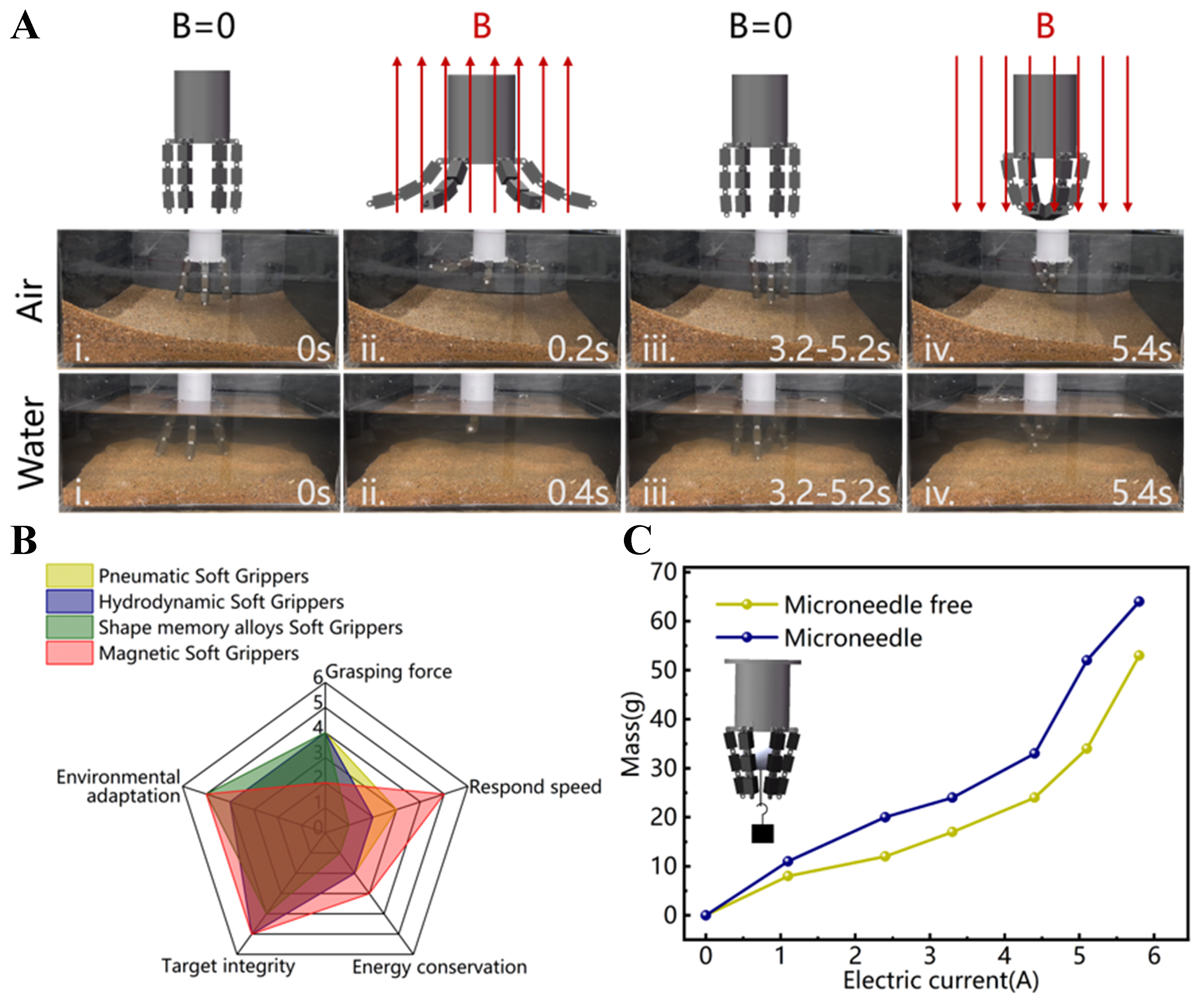
Figure 3. Performance analysis of the magnetically actuated flexible gripper. (A) Comparison of the gripper’s response in air and underwater environments; (B) Comparative performance analysis between the magnetically actuated flexible gripper and conventional actuation-based flexible grippers; (C) Grasping force comparison of the 60 wt% flexible grippers with and without micro-needles under different driving currents.
Compared with pneumatic or hydraulic soft grippers, the MSG exhibits multiple additional advantages. Figure 3B summarizes a comparative analysis of pneumatic, hydraulic, SMA and magnetic actuation in terms of grasping force, response speed, energy consumption, target damage rate and environmental impact. First, we established scoring criteria (on a 1-5 scale) and data normalization protocols. To ensure a rigorous comparison, we employed multi-dimensional performance metrics to standardize the raw performance data of various soft grippers. The scoring standards are defined as follows: a score of 1 indicates feasibility but with significant structural or systemic penalties; a score of 2-3 represents the mainstream average; a score of 4 indicates performance superior to the average; and a score of 5 represents the optimal level. Regarding data normalization, quantitative values were mapped to qualitative scores aligned with the specific requirements for capturing deep-sea organisms. Detailed analysis of each performance dimension: (1) Grasping force. Multiple actuation methods have been systematically validated for grasping capability: pneumatic soft grippers demonstrate good adaptability and repeatability across a wide range of target masses[48,49]; hydraulic actuation has been shown to provide stable and controllable grasping forces at both micro and macro-scales[50,51]; SMA actuation can generate large grasping force. Lee et al. reported a device capable of lifting on the order of 2,000 g[52]. By contrast, MSGs are typically targeted at millimeter-to-centimeter scale, low-mass objects[38], and their maximum available gripping force is lower than that of the three aforementioned actuation types. For fragile or delicate deep-sea specimens, however, excessive force may cause sample damage, so MSGs possess an intrinsic advantage in achieving effective capture while minimizing injury risk; (2) Response speed. Pneumatic and hydraulic systems typically switch states on the order of 1-3 s[48-51]. SMA actuation completes the heating phase in air within approximately 1 s, but the cooling/recovery phase is substantially longer (from a few seconds up to tens of seconds); in low-temperature environments, cooling times are further prolonged, which limits operational frequency[52]. In contrast, magnetic actuation exhibits very fast mechanical response and can achieve rapid motion underwater as well, giving MSGs a temporal advantage when capturing fast-moving or evasive marine organisms; (3) Energy consumption. Quantified single-grasp energy for a pneumatic system has been reported at ≈1.8485 J
The magnetic approach offers: (1) fast response, since magnetic control does not require mechanical transmissions and can reach millisecond-scale actuation[34], outperforming typical pneumatic/hydraulic response times of 0.1-1 s[53]; (2) low energy consumption, because the coils need only be energized transiently during approach and capture-unlike SMA actuators, which incur high energy costs due to repeated heating/cooling cycles[54]; (3) reduced target damage, as the combination of a compliant silicone body and surface microneedles enables damage-free handling of soft organisms compared with rigid or high pressure systems[17]; and (4) improved environmental compatibility, since the silicone based gripper avoids hydraulic/oil leakage risks associated with fluidic systems[26]. Furthermore, the MSG’s modular architecture facilitates replacement and reconfiguration and obviates tethering with cables, making it particularly suitable for underwater and confined applications. Collectively, these attributes position magnetic soft grippers as attractive solutions for underwater sensing, biological sampling and robotic intervention.
Because the MSG’s grasping force is generated primarily by magnetic attraction from the actuation system, its absolute force is typically lower than that of pneumatic or hydraulic grippers. To enhance practical gripping performance beyond simply increasing coil current or field strength, we incorporate biomimetic ciliate-like microneedles on the contact surface-one of the key design elements enabling high-reliability underwater grasping. The microneedles increase the contact friction coefficient and effective contact area, thereby amplifying surface frictional forces and improving capture reliability. Porous magnetic soft grippers enhance gripper compliance and gripping versatility by introducing porous structures, while also increasing gripping force through increased surface roughness[38]. However, such methods primarily rely on the overall improvement of structural porosity and surface roughness to achieve performance improvements, Furthermore, the maximum known mass that porous grippers can grasp is 42 g, while the maximum mass that the MSG in this study can grasp is 54.1 g, which is 28.8% higher than that of porous grippers. Therefore, microneedle structures have advantages in the field of flexible gripping. And the biomimetic microneedles proposed in this study specifically increase the actual contact area under lubricating water film conditions and improve interfacial friction, thereby significantly improving the static friction coefficient and anti-slip capability without increasing the volume of magnetic materials or significantly altering the overall flexibility of the gripper. This structural design can be seen as a supplement to existing strategies and provides a new engineering path for achieving stable, low-damage gripping under water lubrication conditions. Although comparable data on friction coefficients or slip thresholds are insufficient in existing literature, multiple studies consistently demonstrate that surface morphology and internal structure have a significant impact on gripping performance, which provides a guarantee for the design motivation of using microneedles to improve the gripping ability of lubricated interfaces.
The frictional benefit of microneedles was quantified in Figure 2F. The microneedles are also compliant and deform upon contact, further enlarging the effective contact area. Figure 3C reports grasping tests in which the MSG (60 wt% NdFeB) retrieved a sphere bearing hanging masses; at the same drive current the microneedle-equipped gripper sustained a greater load than the smooth variant. At 6 A the microneedle augmentation increased grasping force by approximately 20%, demonstrating the structure’s important role in enhancing capture capability.
A review of the literature provides reported damage thresholds for representative marine organisms and deep-sea mineral targets, which can be used as reference benchmarks to evaluate grasping force and biological safety in this study. Previous studies indicate that the tensile strength of jellyfish body walls is approximately 0.17 MPa, while their compressive strength is about 1.43 MPa[55]. Sea cucumbers exhibit distinct mechanical responses within a stress range of 0.3-3 MPa[56]. The average fracture force of coralline algae has been measured to be approximately 20-26 N[57]. The compressive strength of mineral nodules has been reported to fall within the range of 0.346-2.286 MPa (346-2,286 kPa)[58]. In contrast, certain crustaceans or hard-shelled organisms (e.g., turtles) possess substantially higher mechanical tolerance thresholds, with reported values on the order of 1 GPa or higher[59]. By comparing the maximum grasping force of the gripper developed in this study with these damage thresholds, potential damage during grasping can be effectively avoided; Quantitative analysis of the contact stress between the gripper and the target through numerical simulation provides a preliminary verification of the “non-destructive gripping” concept proposed in this study (the gripping process is illustrated in Supplementary Figure 1, and the contact stress distribution of the gripped target is shown in Supplementary Figure 2). Simulation results show that the maximum contact stress borne by the gripped target is approximately 9.2 kPa. Comparison of this stress level with the mechanical damage thresholds of typical marine organisms and deep-sea minerals reported in the literature reveals that, under the simulated contact conditions, the local stress applied by the gripper to the target is significantly lower than the tolerance thresholds of many types of organisms and minerals, supporting the feasibility of non-destructive gripping from the perspective of stress level. It should be noted that the above conclusions are based on specific numerical models and boundary conditions. Different contact configurations, material parameters, or more stringent operating conditions may induce stress concentration, leading to higher local stress peaks. Therefore, further research should conduct extended simulations and sensitivity analyses within a broader parameter space to further verify and refine the applicability of non-destructive gripping. Moreover, treating these thresholds as constraints during experimental design can further reduce the risk of non-target injury. Given that the gripper is made of Ecoflex0020/NdFeB composite material, it is necessary to evaluate the impact of its material properties evolving over time on the driving performance. To this end, Young’s modulus and surface remanence were compared between an old sample stored for ten months and a newly prepared sample from the same period (results are shown in Supplementary Figure 3). The results show that within each range of magnetic powder mass fraction, the relative differences in Young’s modulus and surface remanence between the old and new samples are less than 5% [Supplementary Table 1]. This preliminary comparative experiment verifies the conclusion that the mechanical and magnetic properties of MSG do not significantly degrade over ten months timescale. To further investigate the impact of material property evolution on the driving performance, a continuous contraction-expansion durability experiment was conducted: the gripper was subjected to approximately 3,600 cycles of closing/opening movements over 2 h under constant driving conditions (test process is shown in Supplementary Movie 1), and the gripper’s response speed to the driving magnetic field was monitored during the video experiment, as shown in Supplementary Figure 4. The gripper consistently responded stably to the driving magnetic field during the experiment, without any significant degradation in driving performance. Based on this shrink-unfold durability test, we will continue to use grippers with cyclic shrink-unfold treatment to perform continuous gripping tests, and simultaneously verify the long-term durability of the microneedle surface and the stability of the drive system.
Because the microneedles are small, they may be subject to wear or failure during repeated contact cycles; Therefore, systematic durability testing is necessary. To this end, we designed and conducted a microneedle durability verification based on grasping cycles: MSGs performed continuous pick-and-release cycles on an underwater mineral model at a fixed position, as shown in Supplementary Figure 5. Each experiment comprised 50 pick-and-release actions and the protocol was repeated five times (totaling 250 cycles). The number of failed grasps was recorded during the tests to quantify microneedle reliability under repeated loading as shown in Supplementary Movie 2. Experimental observations showed that, in all five independent trials, MSGs reliably completed every grasping action with no failures recorded. These results indicate that, under the applied cyclic conditions and load levels, microneedles maintained sufficient mechanical integrity and contact performance to support sustained underwater grasping tasks. Moreover, for the MSG, continuous contraction-extension durability tests and prolonged grasping experiments provide preliminary experimental evidence that the gripper materials retain stable performance over the short to medium-term service life. However, the above experiments constitute only a preliminary assessment of the time-varying behavior of MSG and the durability of microneedles, and have certain limitations. Future validation should involve multi-dimensional quantitative analysis of the time-varying behavior of MSG, as well as life testing under various conditions (e.g., different contact forces and high-pressure/low-temperature combinations) to more accurately quantify the changes of MSG over time and the durability of microneedles, providing more accurate data for engineering applications.
Although current experimental tests show that the MSG does not exhibit decreased driving performance or time-varying behavior over time, the performance issues that may arise with increased usage still need to be fully considered. This study used open-loop magnetic field actuation to verify the design and material performance. However, we recognize that open-loop control poses several potential risks under long-term cyclic use and complex marine environments. Therefore, closed-loop magnetic field actuation control of the gripper’s motion is a key area for future research. Future development could involve adding mechanical sensors to the gripper’s finger surfaces, allowing the pressure exerted on the finger surfaces during grasping to be transmitted back to the system in real time, thereby adjusting the driving magnetic field strength and saving energy. Furthermore, proportiional-integral-dderivative (PID) control programs could be integrated, and an underwater camera could be equipped to the MSG for precise underwater detection and grasping, making the MSG more intelligent and promising for future deep-sea applications.
In summary, the above performance evaluations demonstrate that the MSG affords clear benefits in response speed, environmental adaptability and safe handling relative to existing underwater grippers. To further elucidate the magneto-fluid-structure coupling mechanisms underlying these behaviors, we next perform detailed simulations of the MSG’s underwater motion under varied current magnitudes and polarities, to quantify magnetic-field distributions during deformation, gripper displacements, and induced fluid motion. These analyses will provide theoretical guidance for multi-objective optimization of future MSGs.
Magnetic field simulation and fluid motion during the MSG’s grasping process
Based on the preceding material characterization, the optimal NdFeB to Ecoflex0020 mass ratio was determined to be 60 wt%. Using this composition, the soft gripper was fabricated and assembled, and its electromagnetic actuation response and grasping capacity were experimentally evaluated. To assess grasping feasibility and to characterize the gripper’s interaction with the surrounding flow under submerged conditions, we performed a set of preliminary grasping tests and multiphysics simulations.
A preliminary grasping experiment was carried out in air to validate the basic manipulation capability [Figure 4A and Supplementary Movie 3]. A cylindrical target with a mass of 15 g was used. Upon energization, the gripper expanded rapidly within 0.2 s and maintained the open configuration for 3 s. The current polarity was then reversed and, under the action of the magnetic torque, the gripper contracted to enclose the object. After holding the grasp for 2 s, the power was cut and the gripper returned to its relaxed initial state. The temporal profile of the opening-closing motion agreed closely with prior response measurements and numerical predictions, confirming the practical feasibility of the proposed magnetic actuation scheme and providing a baseline for subsequent in-water testing.
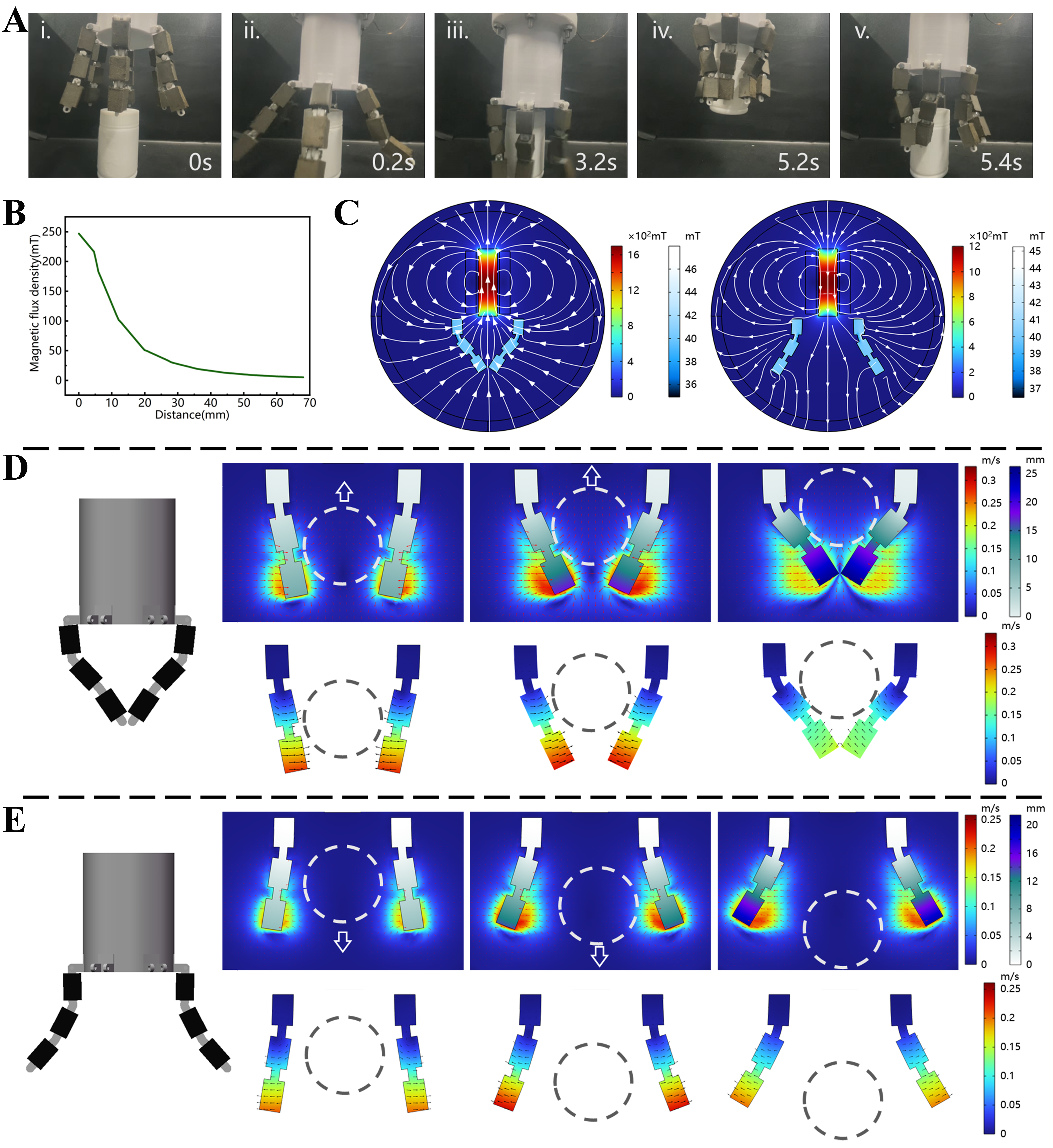
Figure 4. Simulation of gripper motion. (A) Preliminary experimental validation of the fabricated flexible gripper (cylindrical target capture); (B) Magnetic field strength distribution along the axis of the electromagnetic coil at varying distances from the coil’s end face; (C) Magnetic field distribution cross-section during gripper’s capture and stretch; (D) Fluid field dynamics and gripper displacement during the capture phase, along with the gripper’s own motion velocity; (E) Fluid field dynamics and gripper displacement during the stretch phase, along with the gripper’s own motion velocity.
To investigate underwater dynamics and flow interaction, a magneto-fluid-structure interaction (MFSI) model was established. The simulation was implemented using COMSOL. The model includes three physical fields: magnetic field, solid mechanics, and laminar flow, and incorporates multi-physics coupling modules such as dynamic mesh, magneto-mechanics, and fluid-structure interaction. The constitutive model for the material is an Ecoflex0020/NdFeB composite flexible material; therefore, the elastic matrix adopts the Neo-Hookean hyperelastic model, with the strain energy function Equation (1) as follows[60]:
Where I1 is the first invariant of the right Cauchy-Green tensor, C1 is the material constant, and the model is approximated as almost incompressible (Poisson’s ratio ν ≈ 0.49). The magnetic region of the material is defined as a magnetized region with a uniform remanent magnetization vector Mr at each joint of the MSG. The magnitude and direction are obtained from VSM measurements; the remanence Br = 0.03 T is assumed to be uniformly distributed within the composite material region at the finite element scale. For the magnetic field and magnetic force, the static magnetic field H and magnetic flux density B are first solved, with magnetic insulation applied at the domain boundaries. An external coil can generate a steady-state magnetic field by specifying a current density. The magnetic force density applied to the solid is calculated using the divergence of the Maxwell stress tensor, and Equations (2) and (3) are as follows[61,62]:
The obtained body force fm is applied as a body load to the solid mechanics equations. Regarding the fluid model and boundary conditions, an incompressible Newtonian fluid model is adopted (water density
During simulation, contraction was driven with a coil current of 6 A and expansion with 4 A. Figure 4C presents cross-sectional magnetic field distributions for the contraction and expansion states; these distributions are consistent with the experimental response tests, validating the numerical model and the design concept. Figure 4D and E provides the simulated gripper displacement and flow-field disturbance during deformation: during capture the maximum displacement reaches 26.2 mm with a corresponding peak fluid velocity of 0.33 m/s, whereas during stretch the maximum displacement and peak velocity are 21.5 mm and 0.258 m/s, respectively [Supplementary Movies 4-7]. Flow disturbances are concentrated in the immediate vicinity of the gripper, indicating limited perturbation of the ambient fluid and demonstrating the design’s favorable environmental compatibility and low-disturbance characteristics.
The simulated deformation velocity fields show peak speeds of 0.329 m/s for contraction and 0.261 m/s for stretch. These dynamic results corroborate that the MSG achieves substantially faster response than typical conventional soft grippers, in agreement with the experimental comparisons reported in Figure 3B, and indicate that the proposed magnetic actuation scheme enables rapid and stable grasping.
In summary, the simulations elucidate the motion characteristics of the MSG under magnetic excitation and quantify its hydrodynamic footprint. The simulation outcomes are consistent with the material and structural experiments described above and provide essential kinematic and fluid-dynamic reference data for forthcoming in-water grasping trials.
Prototype and grasping performance
Based on the simulation-optimized results of the magneto-fluid-structure coupled field, this section establishes a robotic arm-based experimental platform to quantitatively evaluate the comprehensive grasping performance of the MSG in real underwater environments. Systematic grasping experiments were conducted on five representative underwater targets, aiming to validate the advantages of the MSG in operational reliability, target adaptability, and damage-free manipulation, thereby providing empirical evidence for its application in marine exploration and biological sampling.
To achieve precise and controllable grasping tests, the experimental platform integrated motion control and magnetic field actuation systems, as illustrated in Figure 5A. A six-degree-of-freedom robotic arm was mounted in an inverted configuration on a modular frame, enabling spatial manipulation and trajectory planning to ensure stable approach and retraction during grasping. The magnetic field generation and control system consisted of a National Instruments DAQ card programmed via LabVIEW to output pulse signals, which were amplified (20 times) and supplied to the electromagnetic coil. Additional instrumentation included a water tank, multimeter, and Gauss meter. The gripper and coil system [Figure 5A, inset] was encapsulated in a lightweight PLA 3D-printed shell and flange-mounted to the robotic arm. The gripper was hinge-connected to the coil housing, with a total weight of 680 g, which is substantially lighter than conventional hydraulic or pneumatic end-effectors, thereby extending the endurance of remote operated vehicles (ROVs) and AUVs during underwater operations.
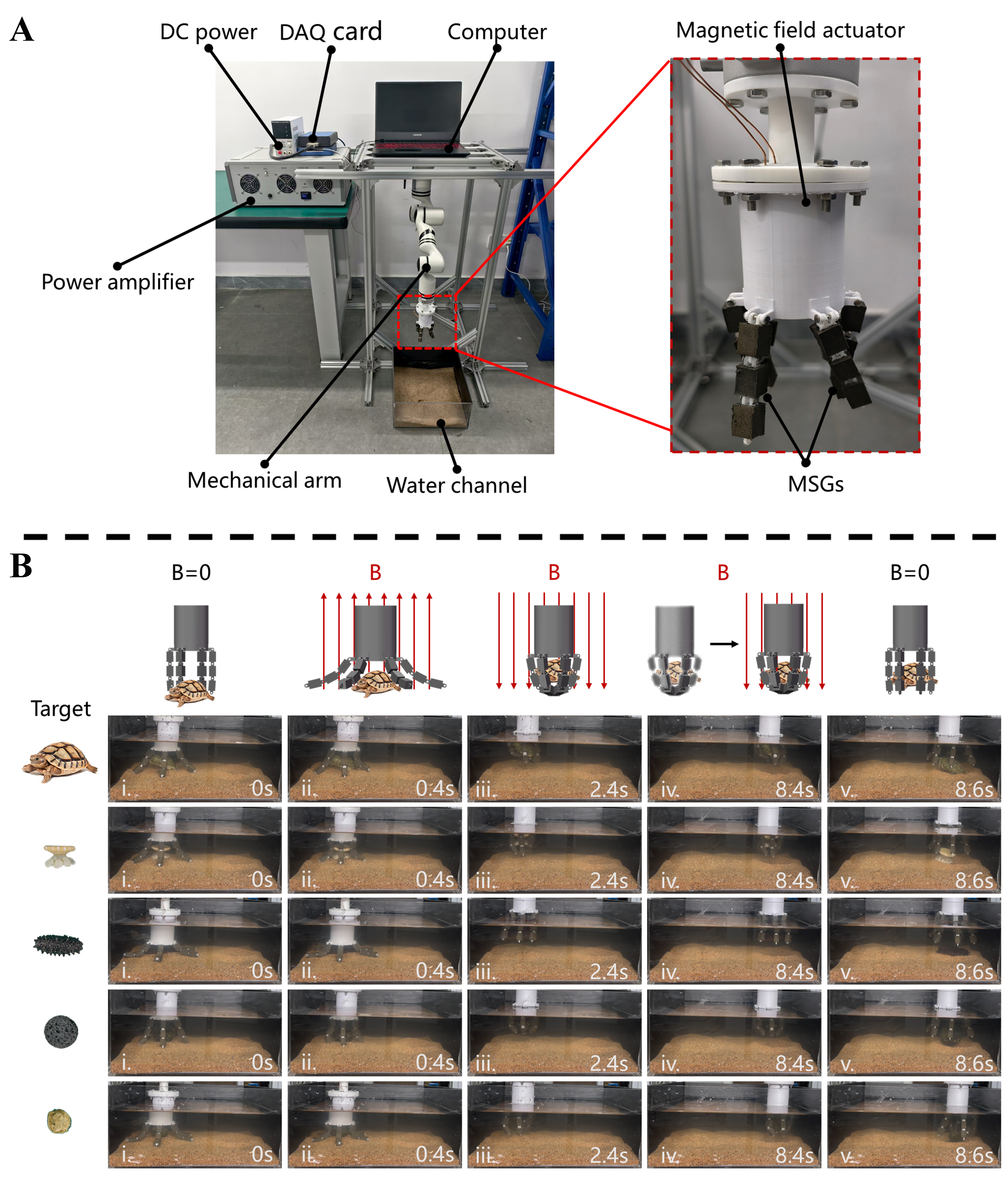
Figure 5. Experimental platform and performance validation of the MSG. (A) Setup of the experimental platform and prototype of the MSG; (B) Performance validation of the gripper during grasping experiments. MSG: Magnetically driven soft gripper; DC: direct current; DAQ: data acquisition.
The grasping protocol is shown in Figure 5B, with test objects including a turtle (28.3 g), jellyfish model
The procedure was as follows: Step 1, the robotic arm was positioned 30 mm above the target with the coil de-energized, leaving the gripper relaxed; Step 2, upon reaching the designated position, a reverse current was applied, generating an upward magnetic field that induced outward expansion of the gripper to increase the capture probability; Step 3, the arm descended until the gripper enclosed the target, after which a forward current was applied, producing inward contraction for grasping; Step 4, the current was maintained to ensure a stable magnetic field during secure grasping, while the arm transported the object to the designated location; Step 5, finally, the current was switched off to release the target, completing one grasping cycle [Supplementary Movies 8-12]. Each object was tested in ten repeated trials to ensure statistical reliability. As shown in Figure 5B, the gripper’s magnetic response speed during grasping was consistent with earlier dynamic tests, confirming rapid actuation during underwater manipulation. Post-experiment inspection revealed no structural damage to any object: the turtle continued normal swimming after release, and the algal sphere remained intact, verifying that the MSG achieved non-destructive grasping.
Experimental results and discussion: The above results demonstrate that the MSG exhibits high reliability, versatility, and safety in complex underwater environments, characterized by rapid response, damage-free manipulation, and strong disturbance resistance. Compared with conventional actuated grippers, the magnetic actuation strategy significantly shortened the expansion-contraction response time, thereby improving overall grasping efficiency. Moreover, the gripper reliably handled spherical, elongated, and irregularly shaped targets, while ensuring non-destructive manipulation of delicate biological samples (e.g., live turtles). With its combination of fast response and soft, safe contact mechanics, the MSG shows strong potential for efficient and non-destructive grasping of dynamic biological targets in marine applications.
Exploration of deep-sea grasping performance
To assess the applicability of the proposed MSG in deep-sea conditions, this study following baseline experiments at ambient pressure and temperature further conducted two sets of experiments (high pressure and low temperature) to simulate extreme operational conditions and to verify the reliability and functionality of the MSG. The experimental procedures and results are summarized below.
High pressure experiments: To mimic the extreme hydrostatic pressure of the deep sea, a sealed high-pressure chamber was pressurized by water injection to a constant pressure of 60 MPa, corresponding to conditions at approximately 6,000 m water depth. The experimental setup is shown in Figure 6A. The procedure was as follows: the chamber was filled with water; a preprepared set of MSGs was placed inside and the chamber was sealed; water was subsequently added until the internal pressure reached 60 MPa, which was maintained for 2 h. After depressurization and retrieval, each MSG underwent an external structural inspection and a residual magnetic induction measurement using a magnetometer, as shown in Figure 6B. Across repeated trials, no structural failure was observed. The mechanical and magnetic properties of the MSGs after high pressure exposure differed from their pretest values within the range of experimental measurement uncertainty and acceptable limits, indicating that short term exposure to high static pressure does not cause significant adverse effects on the MSG developed in this study.

Figure 6. High pressure and low temperature experiments of the MSG. (A) High-pressure chamber instrument panel and its parameters; (B) Comparison of the gripper’s appearance and residual magnetism before and after high-voltage testing; (C) Underwater cryogenic grasping experiment using MSG after high pressure. MSG: Magnetically driven soft gripper.
Low temperature grasping experiments: To evaluate grasping capability at low temperatures, grasping trials were conducted in water below 4 °C using both conventional (control) MSGs and MSGs that had been subjected to the high-pressure treatment described above [Supplementary Movies 13-22]. The high pressure treated MSGs were able to stably grasp targets and transport them to designated locations under low temperature conditions, as shown in Figure 6C. The cryogenic capture of conventional MSGs is shown in Supplementary Figure 6. Grasping performance under low temperature was consistent with that observed at ambient temperature, indicating that low temperature alone does not substantially impair MSG functionality. Through comprehensive evaluation of high-pressure experiment and low-temperature grasping experiment, the MSG can still maintain a sufficiently high success rate in low temperature environment after high pressure test, which shows that the performance of the magnetically driven flexible gripper will not degrade in the deep-sea environment. Moreover, the deep-sea biomimetic soft robotic fish studied by Li et al. has completed experimental testing in the Mariana Trench[11]. The material used in the robotic fish is the same as the material used in this study, which further proves that the MSG of this study is applicable to the deep-sea environment.
Grasping success rates and failure analysis: For each target type, 20 independent grasping trials were performed and success rates were recorded [Supplementary Table 2]. Overall, the MSG achieved near or full 100% success rates for the majority of targets. Occasional failures were observed in trials using the sea cucumber model and the mineral model, but success rates for these remained above 90%. Analysis of the failure cases indicates that failures with the sea cucumber model were primarily caused by insufficient wrapping of the object during MSG contraction; this can be mitigated by optimizing the spatial distribution of MSG elements and the wrapping strategy. Failures with the mineral model were mainly attributable to positional shifts during grasping and to partial nonparticipation of some MSG elements, which reduced the net grasping force; these issues can be reduced by improving path planning and implementing real time position correction.
Limitations and future work: Although the present experiments validate the physical integrity and functional performance of the MSG under the separate extreme conditions of high pressure and low temperature, constraints of the available facilities prevented testing under combined high pressure and low temperature conditions. This represents an important limitation of the current study and will be a focus of future work. Subsequent efforts will upgrade the experimental apparatus to enable systematic evaluation of the MSG in combined high pressure, low temperature environments, thereby more fully validating its feasibility and reliability under realistic deep-sea operational conditions.
Limitations of the MSG
However, this study still has some limitations. No actual in-situ deep-sea experiments have been conducted, and there is a lack of grasping experiments under high pressure and low temperature environments. Furthermore, the targets grasped in the current experiments cannot completely represent actual deep-sea targets; therefore, this is a deficiency that needs to be addressed in future research on deep-sea magnetically driven flexible grasping. Regarding the physical properties of the material, although the quasi-static physical properties of Ecoflex0020/NdFeB are very stable, research on its dynamic properties is insufficient. Future research will focus on the dynamic properties of the material. Future efforts will gradually address the shortcomings of this paper and continuously optimize and improve it.
CONCLUSION
The study developed a rapidly responsive, deep-sea-environment-suitable MSG for efficient and non-destructive acquisition of mineral and marine biological samples. It shows that the magnetic particle filling ratio has a significant coupled effect on the mechanical properties of the composite material and the magnetic drive efficiency, demonstrating a reasonable ratio that balances magnetic responsiveness and material flexibility. The proposed biomimetic ciliary microneedle structure effectively breaks down water films and improves underwater frictional stability, thereby increasing the success rate of grasping without increasing energy consumption. The non-contact magnetic drive method exhibits excellent structural reliability and dynamic response under the high pressure and low temperature conditions of the deep sea. This study provides a scalable design concept and technological foundation for the application of MSG in rapid and non-destructive grasping in the deep sea.
DECLARATIONS
Authors’ contributions
Proposed and designed the research: Yu, S.; Ji, L.; Liang, B.
Performed the research: Yu, S.; Ji, L.; Zhang, W.
Performed the creation of new software used in the work: Liu, X.; Zhang, Z.; Chen, P.
Contributed to the data interpretation and reasoning: Ge, A.; Zhang, L.
Wrote the paper: Yu, S.; Ji, L.
Supervised the research and revised the paper: Xie, Y.; Li, T.
All authors participated in manuscript editing.
Availability of data and materials
All data generated or analyzed during this study are included in this published article and its Supplementary Materials.
AI and AI-assisted tools statement
Not applicable.
Financial support and sponsorship
This work was supported by the National Natural Science Foundation of China (52405044, 52322502, 52175009), National Nature Science Foundation of Shandong province (ZR2024QE311), National Key Research and Development Program (2022YFB4701700), Graduate Student Independent Research Projects (202461067). Fundamental Research Funds for Central Universities (202413017), Postdoctoral Fellowship Program of CPSF (GZC20232498).
Conflicts of interest
All authors declared that there are no conflicts of interest.
Ethical approval and consent to participate
All experiments involving live animals were conducted with institutional animal care and use approval (Approval No. 25-YS-092). Turtles used in the study were obtained via commercial online purchase and were maintained in laboratory care after the experiments.
Consent for publication
Not applicable.
Copyright
© The Author(s) 2026.
Supplementary Materials
REFERENCES
1. Phillips, B. T.; Becker, K. P.; Kurumaya, S.; et al. A dexterous, glove-based teleoperable low-power soft robotic arm for delicate deep-sea biological exploration. Sci. Rep. 2018, 8, 14779.
3. Smith, K. L. Jr; Sherman, A. D.; McGill, P. R.; et al. Abyssal Benthic Rover, an autonomous vehicle for long-term monitoring of deep-ocean processes. Sci. Robot. 2021, 6, eabl4925.
4. Yoerger, D. R.; Govindarajan, A. F.; Howland, J. C.; et al. A hybrid underwater robot for multidisciplinary investigation of the ocean twilight zone. Sci. Robot. 2021, 6, eabe1901.
5. Picardi, G.; Chellapurath, M.; Iacoponi, S.; Stefanni, S.; Laschi, C.; Calisti, M. Bioinspired underwater legged robot for seabed exploration with low environmental disturbance. Sci. Robot. 2020, 5, eaaz1012.
6. Sinatra, N. R.; Teeple, C. B.; Vogt, D. M.; Parker, K. K.; Gruber, D. F.; Wood, R. J. Ultragentle manipulation of delicate structures using a soft robotic gripper. Sci. Robot. 2019, 4, eaax5425.
7. Zhang, X.; Zuo, Y.; Wei, J.; et al. A review on underwater collection and transportation equipment of polymetallic nodules in deep-sea mining. JMSE 2024, 12, 788.
8. Galloway, K. C.; Becker, K. P.; Phillips, B.; et al. Soft robotic grippers for biological sampling on deep reefs. Soft. Robot. 2016, 3, 23-33.
9. Gruber, D. F.; Wood, R. J. Advances and future outlooks in soft robotics for minimally invasive marine biology. Sci. Robot. 2022, 7, eabm6807.
10. Laschi, C.; Calisti, M. Soft robot reaches the deepest part of the ocean. Nature 2021, 591, 35-6.
11. Li, G.; Wong, T. W.; Shih, B.; et al. Bioinspired soft robots for deep-sea exploration. Nat. Commun. 2023, 14, 7097.
12. Xu, Y.; Zhuo, J.; Fan, M.; et al. A bioinspired shape memory alloy based soft robotic system for deep‐sea exploration. Adv. Intell. Syst. 2024, 6, 2300699.
13. Pan, F.; Liu, J.; Zuo, Z.; et al. Miniature deep-sea morphable robot with multimodal locomotion. Sci. Robot. 2025, 10, eadp7821.
14. Yoder, Z.; Rumley, E. H.; Schmidt, I.; Rothemund, P.; Keplinger, C. Hexagonal electrohydraulic modules for rapidly reconfigurable high-speed robots. Sci. Robot. 2024, 9, eadl3546.
15. Wang, T.; Joo, H. J.; Song, S.; Hu, W.; Keplinger, C.; Sitti, M. A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation. Sci. Adv. 2023, 9, eadg0292.
16. Rus, D.; Tolley, M. T. Design, fabrication and control of soft robots. Nature 2015, 521, 467-75.
17. Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft robotic grippers. Adv. Mater. , 2018, e1707035.
18. Polygerinos, P.; Wang, Z.; Overvelde, J. T. B.; et al. Modeling of soft fiber-reinforced bending actuators. IEEE. Trans. Robot. 2015, 31, 778-89.
19. Kurumaya, S.; Phillips, B. T.; Becker, K. P.; et al. A modular soft robotic wrist for underwater manipulation. Soft. Robot. 2018, 5, 399-409.
20. Gong, Z.; Chen, B.; Liu, J.; et al. An opposite-bending-and-extension soft robotic manipulator for delicate grasping in shallow water. Front. Robot. AI. 2019, 6, 26.
21. Hasib, S. A.; Gulzar, M. M.; Oishy, S. R.; Maaruf, M.; Habib, S.; Shakoor, A. An investigation of innovative strategies in underwater soft robotics. Eng. Sci. Technol. Int. J. 2025, 70, 102123.
22. Wu, M.; Afridi, W. H.; Wu, J.; et al. Octopus-inspired underwater soft robotic gripper with crawling and swimming capabilities. Research 2024, 7, 0456.
23. Vogt, D. M.; Becker, K. P.; Phillips, B. T.; et al. Shipboard design and fabrication of custom 3D-printed soft robotic manipulators for the investigation of delicate deep-sea organisms. PLoS. ONE. 2018, 13, e0200386.
24. Teeple, C. B.; Becker, K. P.; Wood, R. J. Soft curvature and contact force sensors for deep-sea grasping via soft optical waveguides. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, Oct 01-05, 2018; IEEE, 2018; pp. 1621-7.
25. Licht, S.; Collins, E.; Mendes, M. L.; Baxter, C. Stronger at depth: jamming grippers as deep sea sampling tools. Soft. Robot. 2017, 4, 305-16.
26. Chen, G.; Yang, X.; Zhang, X.; Hu, H. Water hydraulic soft actuators for underwater autonomous robotic systems. Appl. Ocean. Res. 2021, 109, 102551.
27. Kim, M. S.; Heo, J. K.; Rodrigue, H.; et al. Shape memory alloy (SMA) actuators: the role of material, form, and scaling effects. Adv. Mater. 2023, 35, e2208517.
28. Lum, G. Z.; Ye, Z.; Dong, X.; et al. Shape-programmable magnetic soft matter. Proc. Natl. Acad. Sci. U. S. A. 2016, 113, E6007-15.
29. Yu, S.; Zhang, W.; Feng, Y.; et al. Magnetic cell-mimetic droplet microrobots with division and exocytosis capabilities. Research 2025, 8, 0730.
30. Zhang, W.; Deng, Y.; Zhao, J.; et al. Amoeba-inspired magnetic venom microrobots. Small 2023, 19, e2207360.
31. Zhang, Z.; Wang, L.; Jiang, F.; et al. Fully integrated wearable control system for micro/nanorobot navigation. Int. J. Extrem. Manuf. 2025, 7, 035505.
33. Ebrahimi, N.; Bi, C.; Cappelleri, D. J.; et al. Magnetic actuation methods in bio/soft robotics. Adv. Funct. Mater. 2020, 31, 2005137.
35. Zhou, H.; Mayorga-Martinez, C. C.; Pané, S.; Zhang, L.; Pumera, M. Magnetically driven micro and nanorobots. Chem. Rev. 2021, 121, 4999-5041.
36. Wang, X.; Bai, R. Advances in smart delivery of magnetic field-targeted drugs in cardiovascular diseases. Drug. Delivery. 2023, 30, 2256495.
37. Kim, Y.; Yuk, H.; Zhao, R.; Chester, S. A.; Zhao, X. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 2018, 558, 274-9.
38. Li, X.; Fan, D.; Sun, Y.; et al. Porous magnetic soft grippers for fast and gentle grasping of delicate living objects. Adv. Mater. 2024, 36, e2409173.
39. Xie, Z.; Yuan, F.; Liu, J.; et al. Octopus-inspired sensorized soft arm for environmental interaction. Sci. Robot. 2023, 8, eadh7852.
40. Zhang, Y.; Kong, D.; Shi, Y.; et al. Recent progress on underwater soft robots: adhesion, grabbing, actuating, and sensing. Front. Bioeng. Biotechnol. 2023, 11, 1196922.
41. Nardekar, S. S.; Kim, S. J. Untethered magnetic soft robot with ultra-flexible wirelessly rechargeable micro-supercapacitor as an onboard power source. Adv. Sci. 2023, 10, e2303918.
42. Dong, Y.; Wang, L.; Xia, N.; et al. Untethered small-scale magnetic soft robot with programmable magnetization and integrated multifunctional modules. Sci. Adv. 2022, 8, eabn8932.
43. Joyee, E. B.; Pan, Y. A fully three-dimensional printed inchworm-inspired soft robot with magnetic actuation. Soft. Robot. 2019, 6, 333-45.
44. Zhu, Z.; Wang, J.; Pei, X.; et al. Blue-ringed octopus-inspired microneedle patch for robust tissue surface adhesion and active injection drug delivery. Sci. Adv. 2023, 9, eadh2213.
45. Miao, J.; Sun, S. Design, actuation, and functionalization of untethered soft magnetic robots with life-like motions: a review. J. Magn. Magn. Mater. 2023, 586, 171160.
46. Karacakol, A. C.; Alapan, Y.; Demir, S. O.; Sitti, M. Data-driven design of shape-programmable magnetic soft materials. Nat. Commun. 2025, 16, 2946.
47. Xavier, M. S.; Tawk, C. D.; Zolfagharian, A.; et al. Soft pneumatic actuators: a review of design, fabrication, modeling, sensing, control and applications. IEEE. Access. 2022, 10, 59442-85.
48. Wang, Y.; Gupta, U.; Parulekar, N.; Zhu, J. A soft gripper of fast speed and low energy consumption. Sci. China. Technol. Sci. 2018, 62, 31-8.
49. Zhang, Z.; Ni, X.; Wu, H.; et al. Pneumatically actuated soft gripper with bistable structures. Soft. Robot. 2022, 9, 57-71.
50. Yoder, Z.; Macari, D.; Kleinwaks, G.; Schmidt, I.; Acome, E.; Keplinger, C. A soft, fast and versatile electrohydraulic gripper with capacitive object size detection. Adv. Funct. Mater. 2022, 33, 2209080.
51. Baghbani Kordmahale, S.; Qu, J.; Muliana, A.; Kameoka, J. A hydraulic soft microgripper for biological studies. Sci. Rep. 2022, 12, 21403.
52. Lee, J. H.; Chung, Y. S.; Rodrigue, H. Long shape memory alloy tendon-based soft robotic actuators and implementation as a soft gripper. Sci. Rep. 2019, 9, 11251.
53. Jung, Y.; Kwon, K.; Lee, J.; Ko, S. H. Untethered soft actuators for soft standalone robotics. Nat. Commun. 2024, 15, 3510.
54. Li, X.; Ma, Y.; Wu, C.; et al. A fast actuated soft gripper based on shape memory alloy wires. Smart. Mater. Struct. 2024, 33, 045011.
55. Zhu, J.; Wang, X.; He, C.; Wang, H. Mechanical properties, anisotropic swelling behaviours and structures of jellyfish mesogloea. J. Mech. Behav. Biomed. Mater. 2012, 6, 63-73.
56. Motokawa, T.; Tsuchi, A. Dynamic mechanical properties of body-wall dermis in various mechanical states and their implications for the behavior of sea cucumbers. Biol. Bull. 2003, 205, 261-75.
57. Martone, P. T.; Denny, M. W. To break a coralline: mechanical constraints on the size and survival of a wave-swept seaweed. J. Exp. Biol. 2008, 211, 3433-41.
58. Liu, B.; Wang, X.; Zhang, X.; Liu, J.; Rong, L.; Ma, Y. Research status of deep-sea polymetallic nodule collection technology. JMSE 2024, 12, 744.
59. Achrai, B.; Wagner, H. D. Micro-structure and mechanical properties of the turtle carapace as a biological composite shield. Acta. Biomater. 2013, 9, 5890-902.
60. Rivlin, R. S. Large elastic deformations of isotropic materials IV. further developments of the general theory. Philos. Trans. A. Math. Phys. Eng. Sci. 1948, 241, 379-97.
61. Maxwell, J. C. A treatise on electricity and magnetism. Vol. 1. Stress in the electromagnetic field. Clarendon Press, Oxford; 1873. https://archive.org/details/electricandmagne01maxwrich/page/n11/mode/2up. (accessed 11 Mar 2026).
62. Jackson, J. D. Electromagnetic momentum and stress tensor. In Classical electrodynamics, 3rd ed.; John Wiley & Sons, New York; 1999. https://ieee.li/pdf/essay/classical-electrodynamics-john-david-jackson.pdf. (accessed 11 Mar 2026).
Cite This Article
How to Cite
Download Citation
Export Citation File:
Type of Import
Tips on Downloading Citation
Citation Manager File Format
Type of Import
Direct Import: When the Direct Import option is selected (the default state), a dialogue box will give you the option to Save or Open the downloaded citation data. Choosing Open will either launch your citation manager or give you a choice of applications with which to use the metadata. The Save option saves the file locally for later use.
Indirect Import: When the Indirect Import option is selected, the metadata is displayed and may be copied and pasted as needed.
About This Article
Special Topic
Copyright

Data & Comments
Data
0













Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at [email protected].