



fig2
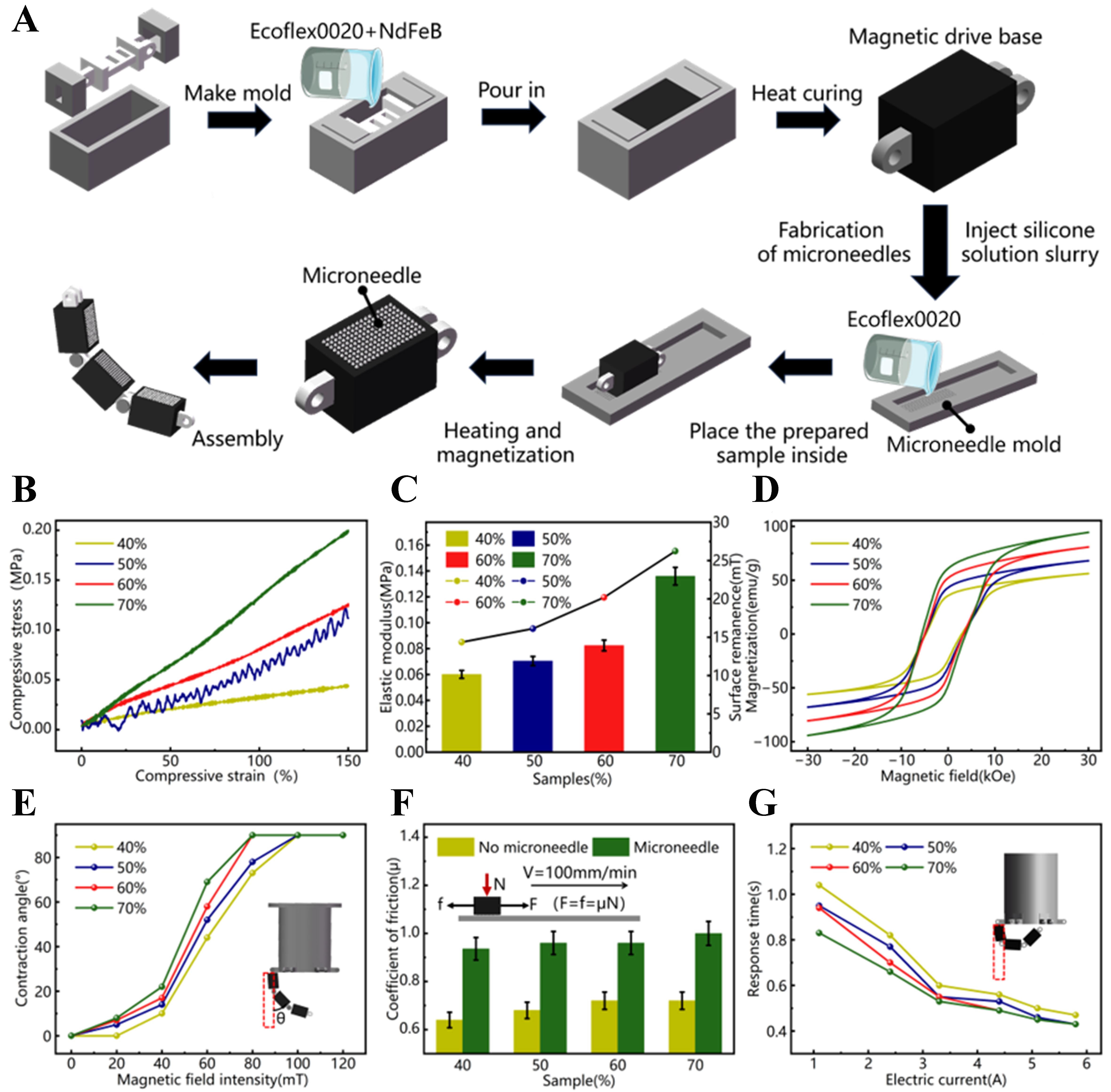
Figure 2. Fabrication process and performance characterization of the soft gripper. (A) Fabrication steps of the MSG, showing the preparation of Ecoflex0020/NdFeB composites, modular assembly, and integration of micro-spine structures; (B) Stress-strain curves of four different gripper samples; (C) Young’s modulus and surface remanence of samples with different mass fractions; (D) M-H curves of samples with different mass fractions measured as the magnetic field was swept from -30 to 30 kOe; (E) Bending angles of grippers with different mass fractions under varying magnetic fields; (F) Friction performance (normalized friction coefficient) of samples with and without micro-spines under a 35 g (0.343 N) preload; (G) Response time of soft grippers with varying particle loadings under different driving currents, defined as the time required for the second segment to reach a bending angle of 90° from the initial state. MSG: Magnetically driven soft gripper; M-H curves: magnetization (M) vs. magnetic field (H) curves.





