



fig7
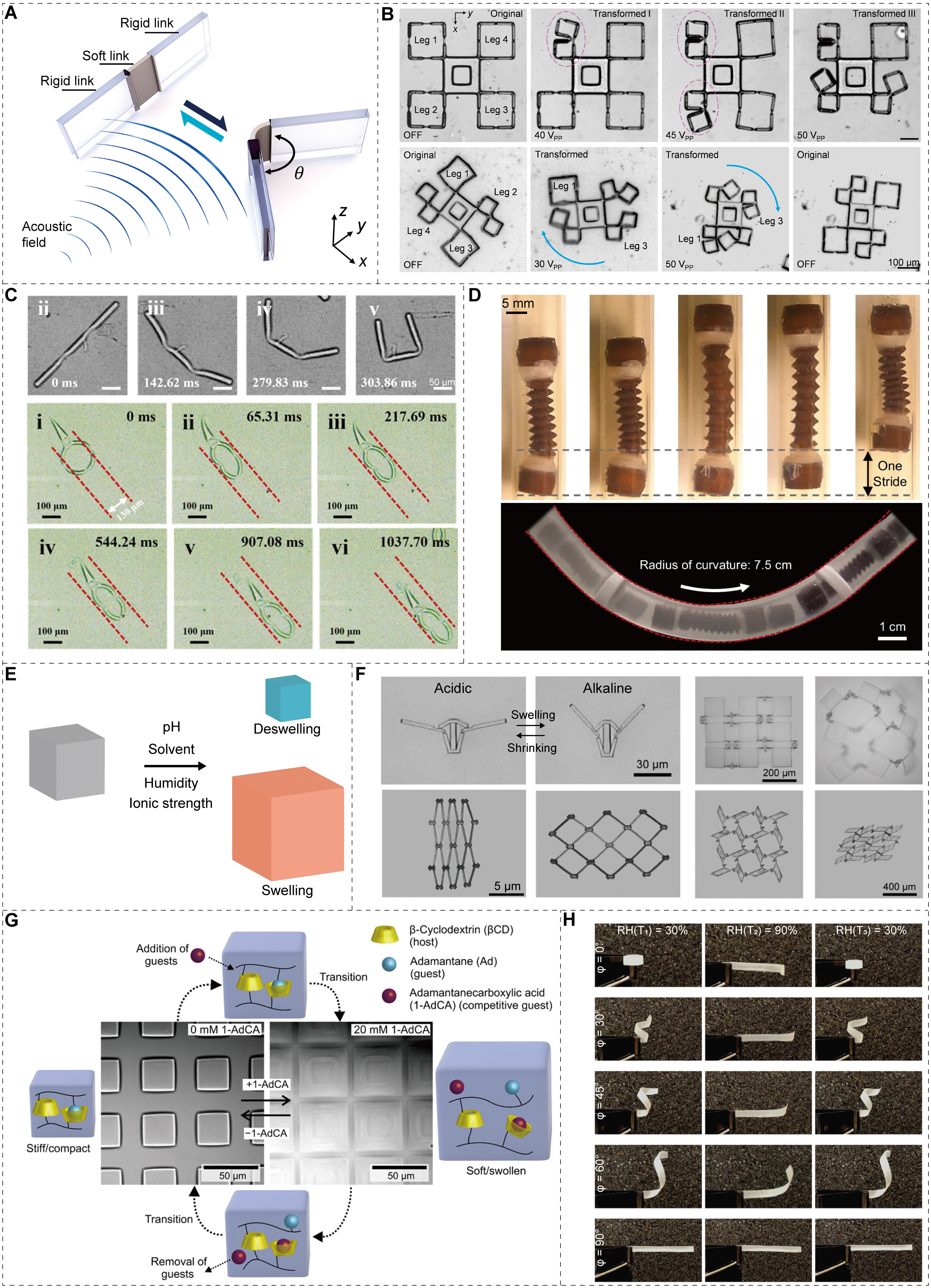
Figure 7. Ultrasound and chemical stimuli actuation of 4D-printed soft microbots. (A) Ultrasound actuation mechanism. Reproduced with permission from Ref.[130]. Copyright 2024, National Academy of Sciences; (B) Acoustically activated micromachine with stiffness programmed soft hinges for millisecond folding. Reproduced with permission from Ref.[130]. Copyright 2024, National Academy of Sciences; (C) Ultrasound-driven hydrogel micromachine with variable-stiffness hinges for rapid letter-to-character morphing and fast channel navigation. Reproduced with permission from Ref.[33]. Copyright 2025, Elsevier; (D) Focused ultrasound phase transition soft robot for millimeter scale selective actuation and Newton level force. Reproduced with permission from Ref.[132]. Copyright 2024, Springer Nature; (E) Chemical stimuli actuation mechanism. Reproduced with permission from Ref.[119]. Copyright 2022, Springer Nature; (F) TPP printed micro hinged hydrogel actuator driven by pH-responsive hydrogel muscles for programmable multi-degree of freedom folding. Reproduced with permission from Ref.[34]. Copyright 2025, Wiley-VCH; (G) 3D laser lithography scaffold with β-cyclodextrin adamantane chemistry for reversible chemically actuated cell stretching. Reproduced with permission from Ref.[134]. Copyright 2020, American Association for the Advancement of Science; (H) 4D printed humidity-actuated seed-like soft robot from biodegradable hygroscopic polymers for autonomous reshaping and soil interaction. Reproduced with permission from Ref.[135]. Copyright 2023, Wiley-VCH. 4D: Four-dimensional; TPP: two-photon polymerization; 3D: three-dimensional; RH: relative humidity.





