



fig4
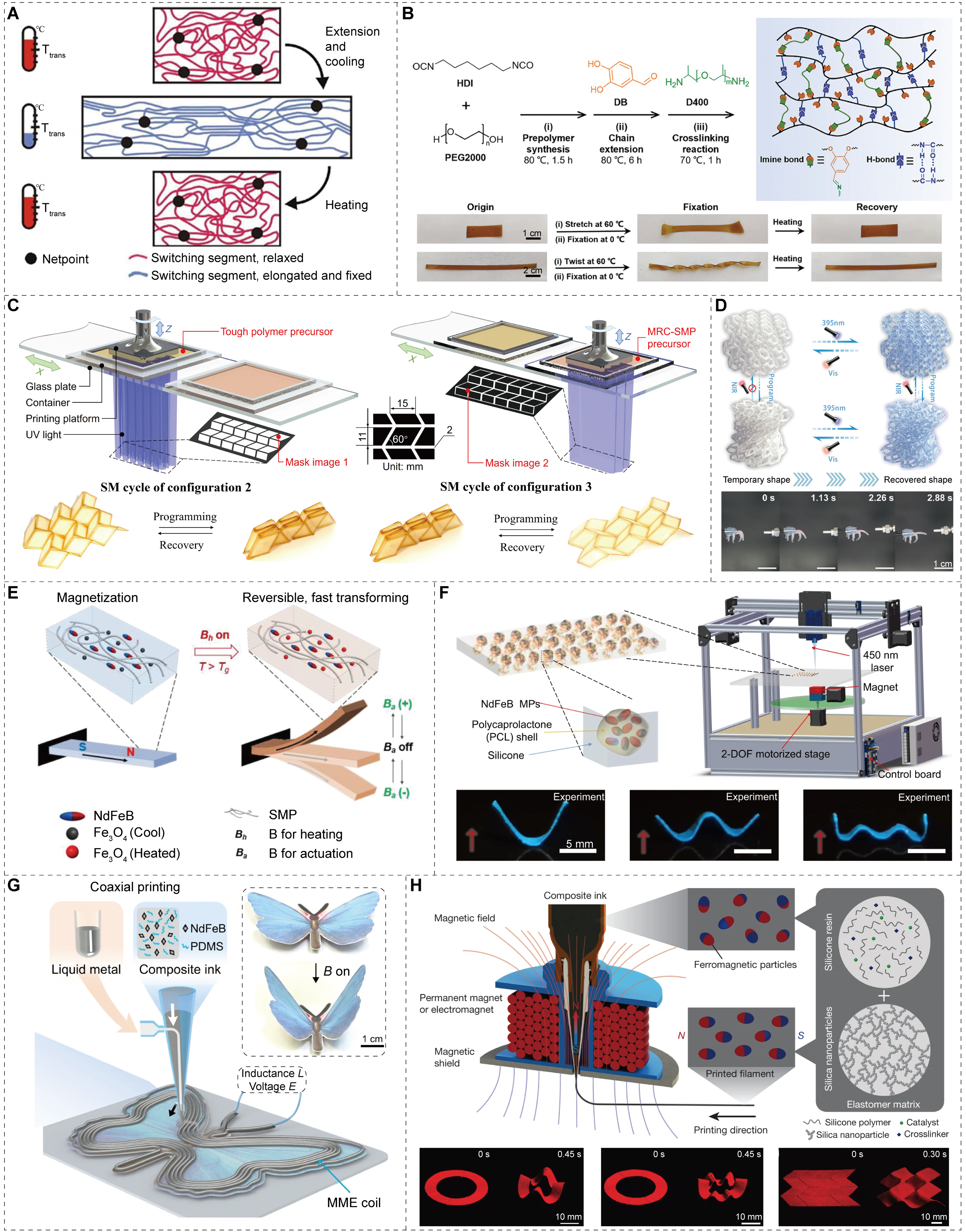
Figure 4. 4D-printed soft microbots based on SMPs and magnetic nanocomposite polymers. (A) SMP actuation mechanism. Reproduced with permission from Ref.[92]. Copyright 2023, MDPI; (B) Dynamic covalent SMP artificial muscle with body temperature recovery, self-healing and recyclable biodegradable network. Reproduced with permission from Ref.[93]. Copyright 2024, Wiley-VCH; (C) High-resolution DLP printed covalent adaptable SMP architecture for repeated reconfiguration. Reproduced with permission from Ref.[94]. Copyright 2024, American Association for the Advancement of Science; (D) WO2.9 nanoparticle doped SMP nanocomposite via DLP for optically addressable reversible morphing. Reproduced with permission from Ref.[95]. Copyright 2024, Wiley-VCH; (E) Magnetic nanocomposite polymers actuation mechanism. Reproduced with permission from Ref.[96]. Copyright 2020, Wiley-VCH; (F) Laser rewritable magnetic elastomer film for single field multimodal morphing. Reproduced with permission from Ref.[100]. Copyright 2020, Springer Nature; (G) Coaxial core sheath fiber for actuation sensing and wireless power. Reproduced with permission from Ref.[101]. Copyright 2023, Springer Nature; (H) DIW ferromagnetic elastomer with aligned domains for rapid magnetic morphing. Reproduced with permission from Ref.[102]. Copyright 2018, Springer Nature. 4D: Four-dimensional; SMPs: shape memory polymers; DLP: digital light processing; DIW: direct ink writing; HDI: hexamethylene diisocyanate; DB: 3,4-dihydroxybenzaldehyde; UV: ultraviolet; SM: shape memory; MRC-SMP: mechanically robust covalent adaptable networks shape memory polymer; NIR: near infrared; MPs: microparticles; 2-DOF: two degrees of freedom; PDMS: polydimethylsiloxane; MME: magnetic-mechanical-electrical.





