



Helical ionotropic gel-fiber sensor with omnidirectional strain perception for multidimensional motion correction in adolescent activity assessment
 0
0 Abstract
Conductive ultra-soft hydrogel-based wearable sensors, despite featuring multifunctional adaptability, still face inherent mechanical weaknesses and inadequate directional stress discernment. To address this challenge, we herein rationally designed a helical twisted alginate/agar/carbon nanotube triple-network composite gel fiber through a low-temperature-assisted wet-spinning technique coupled with cation crosslinking. The resulting gel fibers exhibit exceptional mechanoelectrical synergy, achieving conductivity up to 3.8 S/m while sustaining thousandfold self-weight loads via synergistic polymer entanglement and coordination interactions. The implemented helical architecture demonstrates enhanced strain responsivity (56%-130%, gauge factor), rapid response kinetics (< 0.5 s), and rate-agnostic stability in twisted fibers, enabling 360° spatiotemporal perception through three orthogonally coupled mechanisms: torsion-activated interfacial contact expansion, spiral topology-optimized charge transfer, and stress-dissipative dynamic microcavity formation based on the one-dimensional intrinsic uniaxial deformation amplification of gel fibers under multi-directional stresses. Practical validations include four-phase table tennis swing biomechanics analysis, proof-of-concept for handwriting training and motion correction systems, and motion-encoded encrypted communications, establishing a fundamental mechanistic framework for directional angle sensing with applications in assessment of adolescents’ daily activities. Ultimately, this breakthrough stems from the harmonization of helix-driven anisotropic sensitivity and triple-network viscoelastic dissipation, effectively resolving the longstanding compromise between directional acuity and mechanical durability in hydrogel-based sensors.
Keywords
INTRODUCTION
Nowadays, there has been a growing interest in the development of advanced wearable sensors due to their potential applications in health monitoring, human-machine interactions, and flexible electronics[1-3]. Among these innovations, conductive gel fibers have emerged as promising wearable sensor candidates owing to their unique properties such as excellent electrical conductivity, mechanical flexibility, and stretchability[4]. The gel fibers are able to conform to human skin and withstand repeated stretching and bending to monitor physiological parameters and environmental conditions[5-7]. Moreover, gel fibers maintain high performance under mechanical deformations, which are essential for wearable technologies that require both comfort and durability[8-10]. Furthermore, the incorporation of conductive materials within the gel matrix allows for effective signal transduction, making these fibers suitable for applications such as strain sensing[11,12], pressure detection[13,14], and temperature monitoring[15]. Recent research has highlighted the significance of controlling the woven structures of conductive gel fibers to optimize their sensing performance. The arrangement and alignment of fibers within the woven matrix can significantly influence the sensor’s mechanical properties and electrical conductivity[16,17]. Advanced fabrication techniques, such as precise control over fiber density, orientation, and inter-fiber spacing, have been employed to enhance the performance and functionality of these wearable sensors[18]. For instance, a higher density of woven fibers can improve the sensitivity of the sensor to small deformations, while specific weaving patterns can tailor the sensor’s response to different types of mechanical stimuli[19,20]. The development of novel weaving strategies and the incorporation of multifunctional fibers into the gel matrix further expand the capabilities of conductive gel fibers. Research has shown that integrating various types of conductive fillers, such as carbon nanotubes (CNTs)[21] or metallic nanoparticles[22,23], into the gel can enhance the overall conductivity and responsiveness of the fibers. Additionally, the ability to fine-tune the gel’s mechanical properties through compositional adjustments allows for the creation of sensors with customizable performance characteristics[24,25].
Among the various applications of conductive gel fibers, direction sensing has emerged as a particularly promising area of research. Direction sensing refers to the ability of a sensor to detect and respond to changes in orientation within three-dimensional space, which is crucial for applications such as virtual reality, augmented reality, and motion tracking[26,27]. The exploration of conductive gel fibers for direction sensing involves several key aspects such as the orientation and arrangement of fibers in the woven matrix playing a critical role in direction sensing. Specific weaving patterns and conductive filler distributions can be optimized to enhance sensitivity, making it possible to tailor the response to various directional stimuli[28]. Optimizing filler distribution can lead to improved directional response and overall sensor performance. Finally, recent research demonstrates that the sensing ability may be affected by material fatigue and changes in conductivity under rapid deformation and dynamic strain[29]. Therefore, the integration of direction sensing ability and other sensing performances such as temperature or humidity would not only improve the detection accuracy but also expand the range of applications for more complex fields[30].
Conductive gel fibers prepared with helical intertwined architectures recently enabled the detection of torsion and strain concurrently by sensitively measuring changes in capacitance and resistance, which occur when twisting or stretching alters the contact area between the fibers[10]. These soft and stretchable sensors offer a simple mechanism for monitoring large torsional deformations, making them suitable for applications such as unconventional robotics or artificial muscles. Furthermore, the structure also responds to tensile strain: fiber elongation increases contact area, thereby enhancing capacitance and/or resistance. Compared to traditional strain sensors, there is growing demand for flexible sensors capable of measuring complex strains and multidimensional motions[24]. This helical intertwined sensor concept provides a reliable pathway for developing high-performance gel-fiber based stretchable sensors. Therefore, the twisted helical structure was selected for its unique combination of interfacial bonding enhanced mechanical strength, anisotropic multi-directional sensing capabilities, and superior structural stability. Compared to other plain or twill braid configurations, the twisted structure better aligns with our goal of developing durable, direction-sensitive smart fibers.
Thus, this study developed novel triple-network conductive gel fibers combined with a twisted structural design aiming to address the challenge of multi-directional spatial sensing for wearable electronics. The nano-micro conductive architecture and integration of internal stress within the hydrogel enhances their ability to detect pressure signals with directional sensitivity, and correspond to a relaxed or tightened state of the twisted gel-fiber sensors. This research not only improves the performance of conductive gel fibers in pressure sensing (e.g., finger and joint motions) but also expands their functionality to include spatial direction detection (e.g., wrist writing and directional rotations). The findings have paved the way for more sophisticated and responsive sensing solutions for effective and precise direction sensing applications (e.g., handwriting correction and posture monitoring).
EXPERIMENTAL
Materials
Chemicals: Sodium alginate (SA, specification: G: M = 1.5, Mw = 6.4 × 104 g/mol, viscosity: 200 ± 20 mPa·s), lithium chloride (LiCl) and cupric chloride (CuCl2) were purchased from Guoyao Chemical Reagents Co., Ltd. Low melting point agarose (Agar) was sourced from McLean Biochemical Co., Ltd. Multi-walled CNTs were acquired from XFNANO Materials Technology Co., Ltd. Sodium dodecyl sulfate (SDS, Mw =
Preparation of composite hydrogel fiber
Initially, a 2 w/v% SA solution was prepared by dissolving SA powders in 100 mL of deionized water and magnetically stirring at R.T. for 1 h. Subsequently, a 4 w/v% Agar solution was prepared via dissolving the powders in 100 mL of water and heated at 80 °C for 5 min. The 2 w/v% CNTs aqueous solution was dispersed in 50 mL of water to obtain a solution, followed by the addition of 1.1 w/v% SDS to obtain a homogeneous mixture. Finally, the Agar/SA/CNTs mixtures were constructed by mixing the above three solutions (2:1:1) and magnetically stirred at 55 °C for 1 h to ensure uniformity, followed by an ultrasonic treatment (15 min). An injection device consisting of a pump, syringe, hose, and coagulation bath was assembled. The hydrogel fiber was extruded by an injection pump (diameter: 1 mm; flow rate: 0.1-10 mL/min) into CuCl2 solution (1 M) as the coagulation bath. The resulting fibers were placed in the coagulation bath until the inner spinning solution was completely solidified, and then immersed in different concentrations of LiCl solutions (0.25, 0.5, 1.0 mol/L) for ion exchanging. The as-prepared fibers were denoted as SF0.25, SF0.5 and SF1.0, respectively.
Hydrogel fiber sensor measurement
The strain-sensing properties of the hydrogel fibers were characterized via the combination of an electronic tensile testing machine (Instron 6957) and a Keithley 2450 digital source table. The hydrogel fiber was fixed, with both ends connected to a portable resistance test system to measure dynamic resistance during stretching and recovery or rotational resistance change during multiple twists. In some cases, the gel fibers were adhered to human skin, and the end was connected to the digital source table to record relative resistance changes during movement. The hydrogel was applied to the hand joint to measure resistance changes at different bending or rotation angles/directions. The relative resistance variation (ΔR/R0) and the gauge factor (GF) were calculated using
Where R and R0 are the instantaneous and initial resistance of the hydrogels, respectively; ε is the applied strain.
Characterization
Scanning electron microscopy (SEM, JEOL JSM-6700F) was employed to observe the surface and cross-sectional microstructure of the freeze-dried hydrogel. High-magnification optical images were captured using a microscope (ZEISS, Germany), and the diameter of the hydrogel fibers was measured using Axio Vision SE 64 image analysis software. The mechanical properties were analyzed using a texture analyzer (EZ TEST, Shimadzu, Japan) at a compression rate of 3 mm/min. The length and width of the twisted fibers were measured with a vernier caliper. The resistance of the hydrogel was measured by a digital multimeter, with each group measured five times and averaged.
RESULTS AND DISCUSSION
The conductive hydrogel fibers were first constructed from an aqueous mixture containing two responsive biopolymers - alginate (ion-sensitive) and agar (temperature-sensitive) - along with a commonly used conductive nanofiller, CNTs. To ensure homogeneity, the CNTs were dispersed in the polymer solution using SDS as a surfactant, followed by sonication treatment. No significant sedimentation of CNTs was observed in the precursor dispersion over a 24 h period prior to fiber fabrication. This indicates that SDS was highly effective in debundling the CNTs and stabilizing the dispersion through electrostatic repulsion. As shown in Figure 1A, a wet-spinning method with a pre-gelling microenvironment was employed to facilitate gel fiber formation. The hydrogel fibers were further crosslinked using a transition metal cation solution (containing Cu2+) as an ionic crosslinker, which offers a unique combination of cost-effectiveness, mechanical enhancement, and antimicrobial protection. The ionic crosslinks and physical entanglement of the dual-polymer networks resulted in a triple-network hydrogel fiber with enhanced mechanical strength and conductivity[31]. Specifically, the agar gel provides a porous polymer network formed under low-temperature conditions, while the metal-alginate coordinated complex serves as the second network, and interpenetrating CNTs serve as the third conductive network.
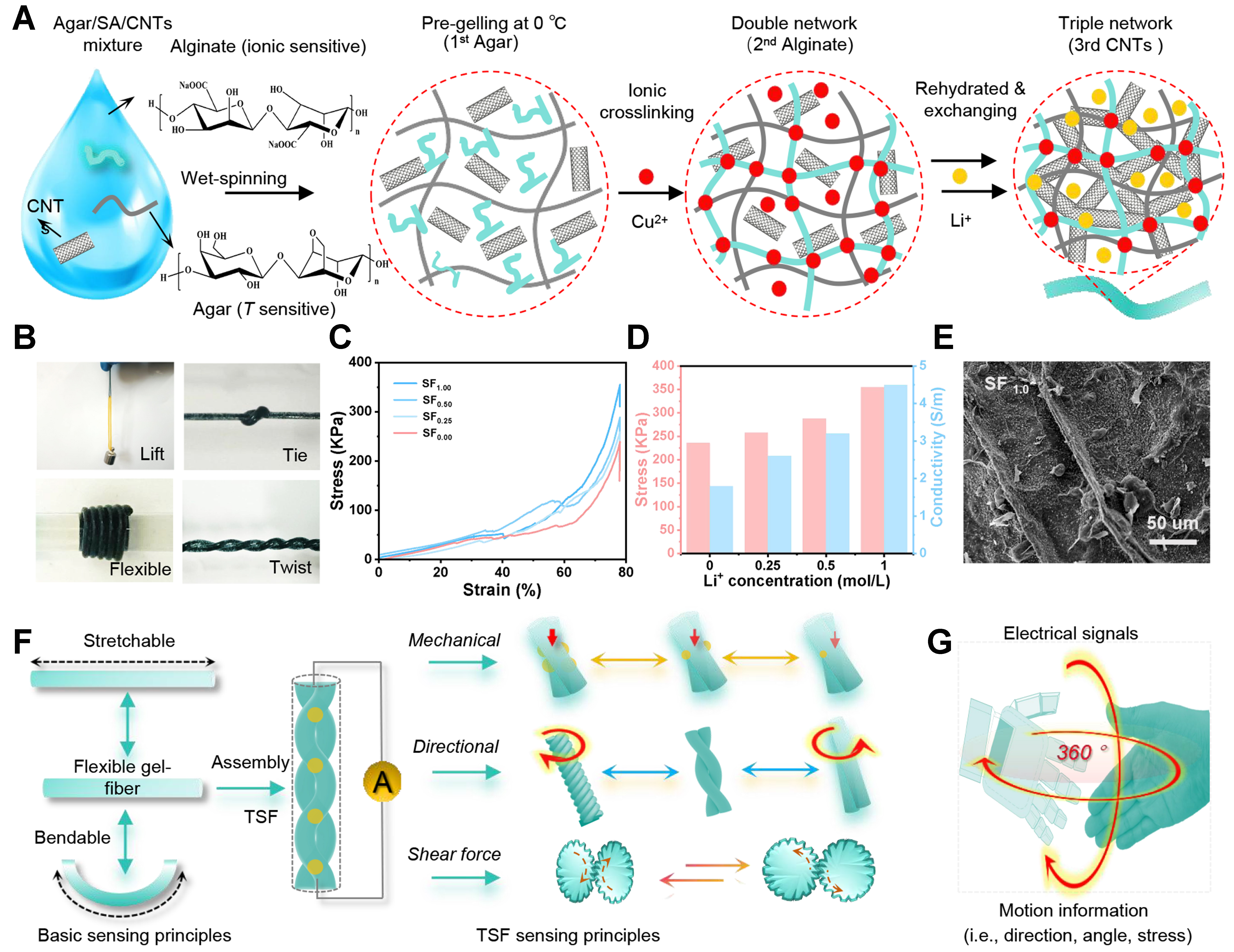
Figure 1. (A) Synthesis and design of a triple-network conductive hydrogel fiber; (B) Mechanical flexibility photographs of the gel fiber; (C) Typical stress-strain curves and (D) conductivities of the gel fibers treated with different ion concentrations; (E) SEM images; (F) Design of twisted gel fiber with directional spatial perception and proposed underlying sensing principles; (G) Potential applications in wearable electronics particularly for directional and angle sensing. SEM: Scanning electron microscopy.
Figure 1B illustrates the flexibility and mechanical robustness of the SF gel fiber, which is capable of withstanding up to 1,000 times its own weight. These fibers can form tight knots, twine, and twist without breaking, indicating high weaving feasibility. The water retention ability of SF was directly evaluated by comparing the wet length (before drying) with the dry length after a 48 h drying treatment [Supplementary Figure 1]. The results suggest that Li+ ion exchange facilitates the water retention properties of the gel fiber, with minimal shrinkage observed across all Li+ concentrations. The mechanical properties were further evaluated via stress-strain tests. As depicted in Figure 1C, the tensile strength and elongation at break of SF fibers improved compared to bare gel fibers. The enhanced mechanical properties of the triple-network hydrogels arise from the synergistic effects of multiple polymer networks. The gel fibers’ conductivity tested with and without lithium ions exchanging treatment is shown in Figure 1D. Lithium acts as a solvent that fills gaps in the polymeric gel matrix, enabling free movement, enhanced conductivity, and improved water retention properties. Figure 1E shows the surface morphology of the gel fibers. Under high-speed solid-spinning conditions, all samples exhibit a dense structure with surface wrinkles. These results can be attributed to the anisotropic orientation and asymmetric shrinkage of polymer chains induced by strong shear forces and low-temperature-induced pregelling effect[32].
The integration of conductive hydrogel fibers into wearable sensors presents several advantages over traditional sensor materials[33]. Firstly, their inherent flexibility reduces the risk of discomfort and restriction associated with rigid sensors, thus enhancing user experience. Secondly, the combination of conductivity and elasticity enables accurate and reliable data collection even in dynamic and challenging conditions. As a result, conductive gel fibers have the potential to revolutionize the field of wearable technology by providing more versatile and adaptable solutions for continuous health monitoring and interactive applications[34]. Therefore, the triple-network conductive gel fibers combined with a twisted structure have been designed, which are expected to address the challenge of multi-directional spatial sensing in wearable sensors. The proposed sensing principle and potential applications have been revealed in Figure 1F. The conductive fillers and triple-network structure ensure robust mechanical properties and conductivity, while the twisted design provides the necessary internal stress for effective direction sensing. The rational design of this twisted hydrogel fiber sensor not only improves the pressure sensing performance (e.g., finger and joint motions) but also confers a typical spatial direction sensing ability (e.g., wrist writing and directional rotations). Finally, as schematically illustrated in Figure 1G, this expectation would spur the potential applications from advancing wearable sensor technology to more sophisticated and practical fields such as adolescent handwriting and motion correction.
This section investigates the sensing performances of the conductive hydrogel fibers. Figure 2A compares single and twisted fiber sensing mechanisms. While single gel fiber (SF) sensors convert linear deformation into electrical signals, they struggle with detecting complex motions (e.g., rotation, torsion). To address this, a helical hydrogel fiber structure was developed, outperforming SFs through three possible mechanisms as follows: (1) torsional compression creates gradient contact networks between fibers. Under strain, compressed screw spacing increases fiber contact area exponentially and activates hidden conductive channels via dynamic pitch adjustments, forming continuous ion permeation paths; (2) the microstructural reconstruction and geometric deformation shortens conductive spacing (optimizes charge transport and enhances capacitance), shifting the regularized ion migration pathways from discrete path-jumping in SFs to multiple diffusion along spiral interfaces; (3) the dynamic microcavity control restricts ion migration freedom for rapid response while enabling stress dissipation through periodic microcavity collapse/reconstruction, improving fatigue resistance.
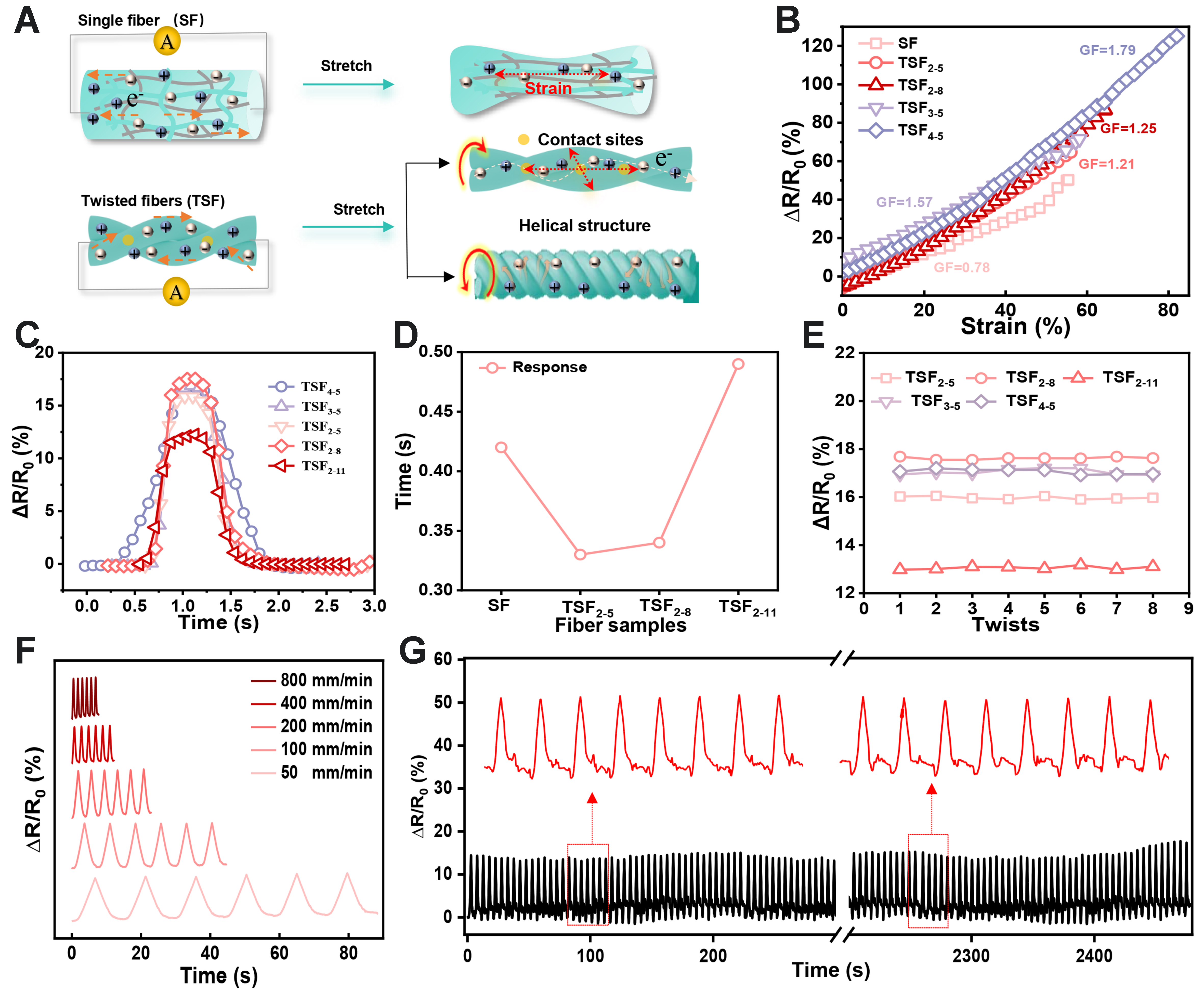
Figure 2. (A) Schematic of the torsion sensing mechanism. Changes in geometry by twisting increase the capacitance between the intertwined fibers; (B) The sensitivity of different numbers of hydrogel fibers and (C) their response-recovery spectra and (D) time comparison; (E) The resistance changes of repeated stretching of gel fibers at a constant rate; (F) The resistance changes of fibers at different tensile rates and (G) The resistance changes of SF during five hundred stretching cycles. SF: Single gel fiber.
To confirm these multi-scale sensing mechanisms, various samples (denoted TGFm-n) have been constructed by using different numbers (m) of gel fibers and twist cycles (n). The single gel fiber (SF) without twisting was provided as bare control. As shown in Figure 2B, the resistance variations increase slowly and evenly with the increases of tensile strain, indicating the fibers possess an excellent strain-dependent sensitivity. The SF represents a linear response with a GF of 0.78. Upon the twist cycle increased and multiple fibers assembled, a wider sensing range of 0%-80% and higher linear sensitivity (GF = 1.21-1.79) were observed from triple-network conductive hydrogel fibers (TSFs), achieving a 56%-130% improvement as compared to the SF. The response plots and time values of these fiber assemblies are shown in Figure 2C and D, respectively. A higher sensitivity and shorter response time (< 0.5 s) can be seen from the twisted fibers as compared to the SF. This result can be assigned to the internal voids and freely moving ions within the gel. The twisting and winding treatments could induce a relatively compact structure, creating more contact conduction paths as strain increases and continuously reducing fiber resistance. To reveal the stabilities of TSF samples, the resistance variations tested under repeated stretching and various testing rates are displayed in Figure 2E and F, respectively. The TSF samples all exhibited excellent stability with a rate-independent sensing performance (50-800 mm/min), demonstrating great potential for rapid and precise detection of complex human motions. Moreover, the hydrogel shows an exceptional sensing durability and maintains stable resistance even after five hundred cycles of tensile deformation [Figure 2G]. Ultimately, this work presents a twisted gel-fiber sensor featuring a considerably high GF, ultra-fast response, and robust cyclic stability. The sensor demonstrates exceptional mechanical resilience, capable of enduring 1,000 times its own weight load while retaining structural integrity when twisted or knotted. Unlike other recent gel fiber-based sensors focused solely on motion detection [Supplementary Table 1], this sensor uniquely enables bidirectional, pressure, and angle sensing, significantly expanding its utility for complex applications. Its balanced performance in sensitivity, speed, and durability positions it as a highly promising candidate for advanced flexible electronics.
Next, we investigate the structural and electrical properties of twisted fiber assemblies under varying fiber numbers (m) and twist cycles (n). As shown in Figure 3A, SEM images reveal helical microstructures of the gel bundles constructed with two fibers (m = 2) under different twist cycles (n = 5, 8, 11). The pronounced surface roughness and spiral geometry demonstrate an obvious twist cycle-dependent morphological evolution. Increasing the twist cycle would significantly induce an architectural compaction through surface microstructure reconstruction and geometric deformation, simultaneously shortening conductive spaces while establishing multiple spiral interface conduction pathways. To elucidate the structure-sensing performance relationship, we systematically analyze dynamic changes in microscopic morphology
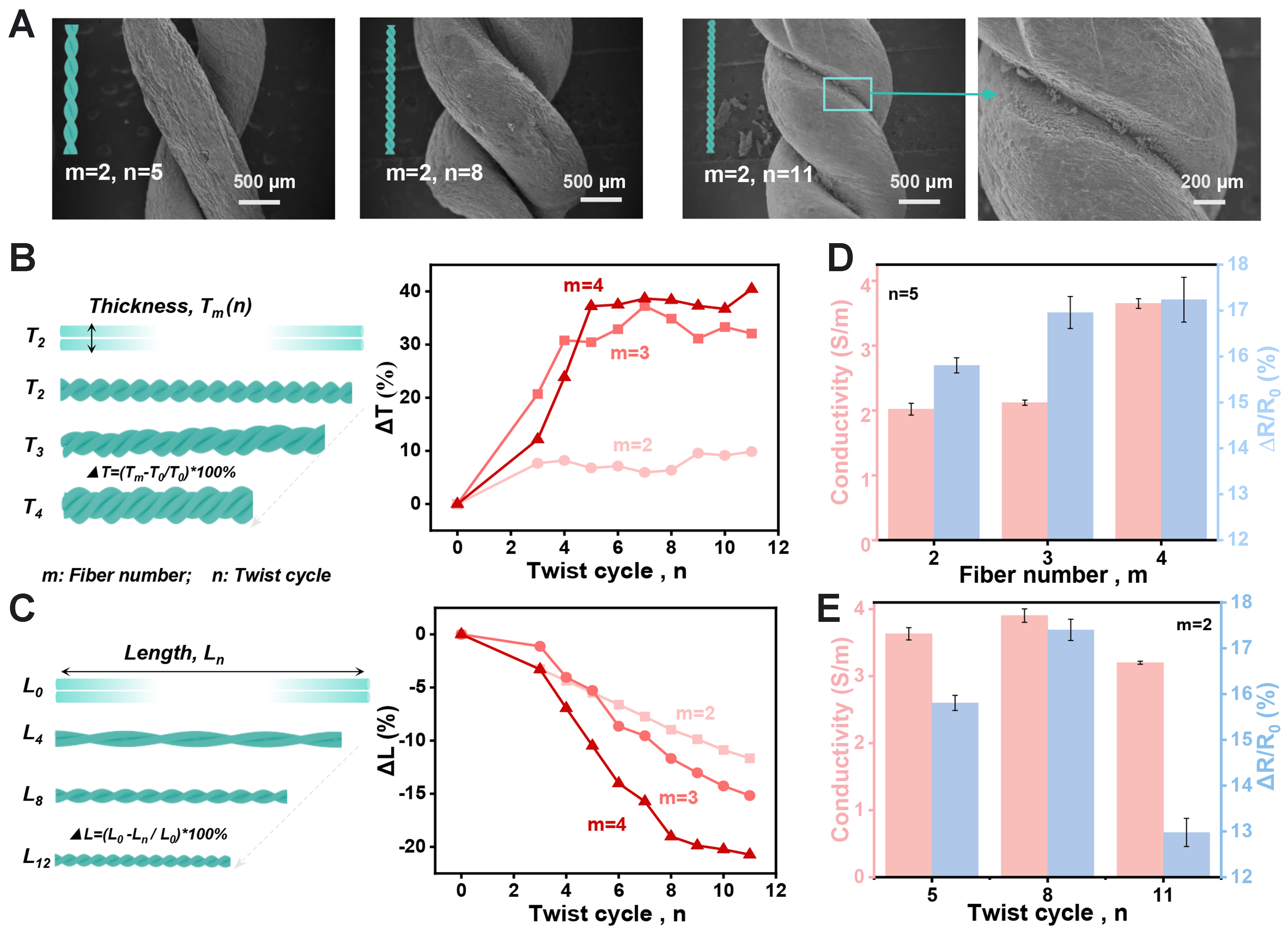
Figure 3. Morphological and electrical characterization of twisted fiber assemblies. (A) SEM images of helical fibers (m = 2, n = 5, 8, 11); (B and C) Fiber thickness and length change with post-twisting; (D and E) Conductivity and resistance as a function of fiber numbers and twist cycles. SEM: Scanning electron microscopy.
The anisotropy of traditional hydrogel sensors often limits their ability to detect stress direction, while the one-dimensional characteristics of conductive gel fibers amplify deformation differences caused by stresses in various directions, indicating significant potential for directional sensing. Therefore, this section systematically investigates the directional and angle-sensing performance of conductive gel fibers to establish fundamental principles for potential applications in adolescent handwriting detection and correction. Figure 4A demonstrates the real-time resistance response of TSF2-5 under bidirectional dynamic twisting. The original pre-twisted fiber state was defined as 0°, with twist-aligned and twist-opposed states designated as positive/negative directions (0°~±90°). Interestingly, enhanced sensitivity was observed in the positive direction, while the asymmetric bipolar response confirmed directional sensitivity through distinct resistance variations corresponding to angular transitions. The negative resistance change in the twist-aligned state arises from the compaction of the pre-twisted helical structure, which increases the contact area between metal-crosslinked conductive domains and creates more parallel conductive pathways. In contrast, the positive resistance change in the twist-opposed state is due to the unwinding of the helix, which reduces contact area and decreases conductive pathways. This anisotropic response enables the sensor to distinguish between twist directions, a critical feature for multi-directional sensing applications.
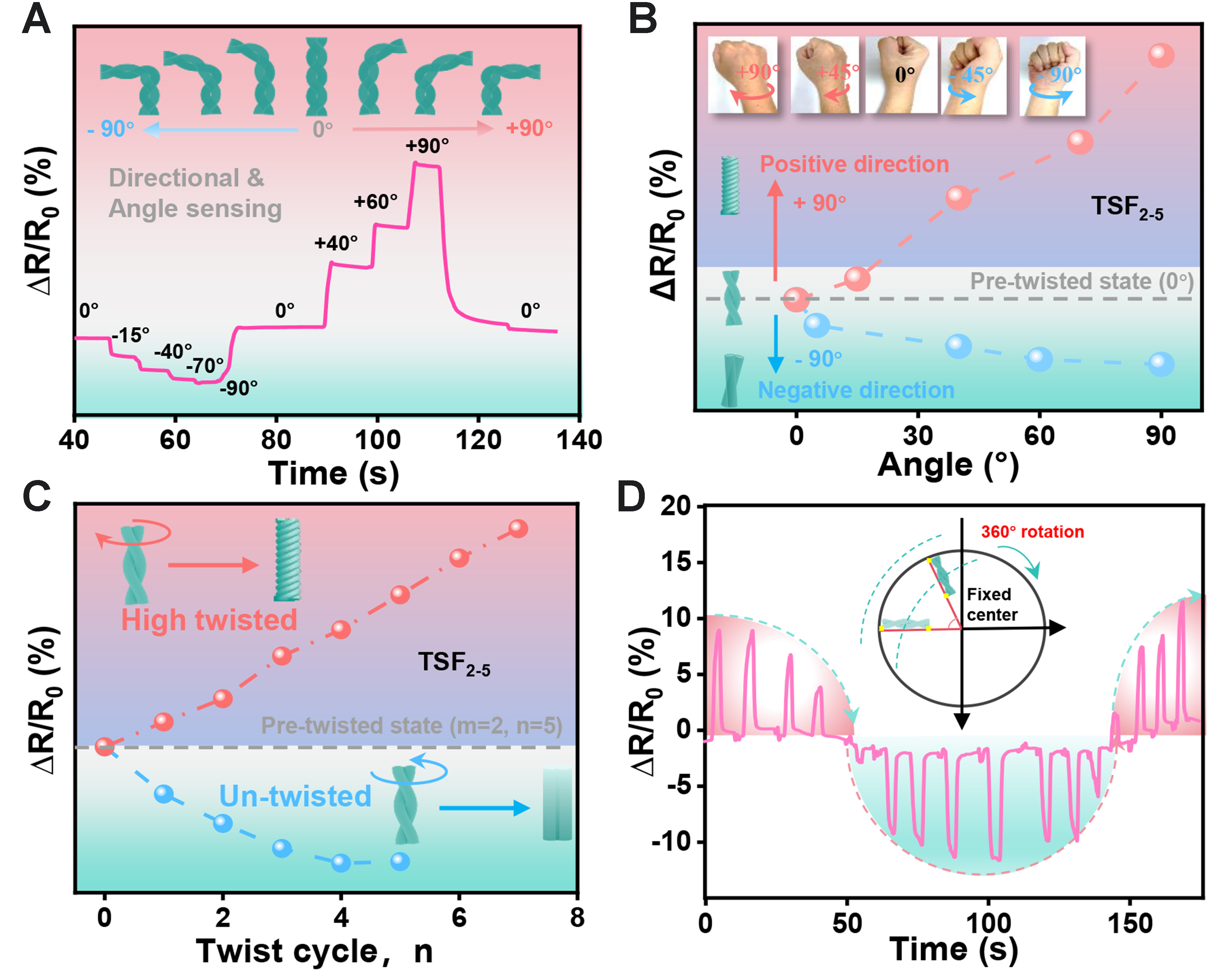
Figure 4. Multifunctional torsional sensing performance of TSF2-5. (A) Real-time resistance response under bidirectional bending with various angles; (B) Monitoring of bidirectional wrist-twist motion of a human; (C) Resistance variation as a function of twist cycles; (D) Rotational sensing capability.
Figure 4B summarizes the resistance-angle correlation during bidirectional bending of TSF2-5. A linear resistance-angle relationship emerged during left/right wrist-twist motions (-90°~90°), demonstrating exceptional sensitivity for directional and angular detection. Figure 4C further validates these findings through cyclic twist-untwist experiments showing reversible resistance changes. The twist-cycle-dependent resistance responses from both directions exhibited similar trends, as dynamically recorded during incremental cycle testing. To evaluate advanced directional detection capabilities, Figure 4D presents a 360° rotation experiment. With one fiber end fixed, the progressive resistance variations were recorded during full rotation (0°-360°). The oscillatory resistance pattern and complete signal recovery at 360° (illustrated through the inserted rotation schematics) highlight the fiber’s anisotropic properties and directional sensing efficacy. These results confirm the twisted gel fiber assemblies’ robust sensing performance under complex multi-directional deformations. Collectively, the TSF’s linear, reversible, and direction-sensitive resistance response positions it as a promising material for advanced flexible sensors in robotics and wearable technology.
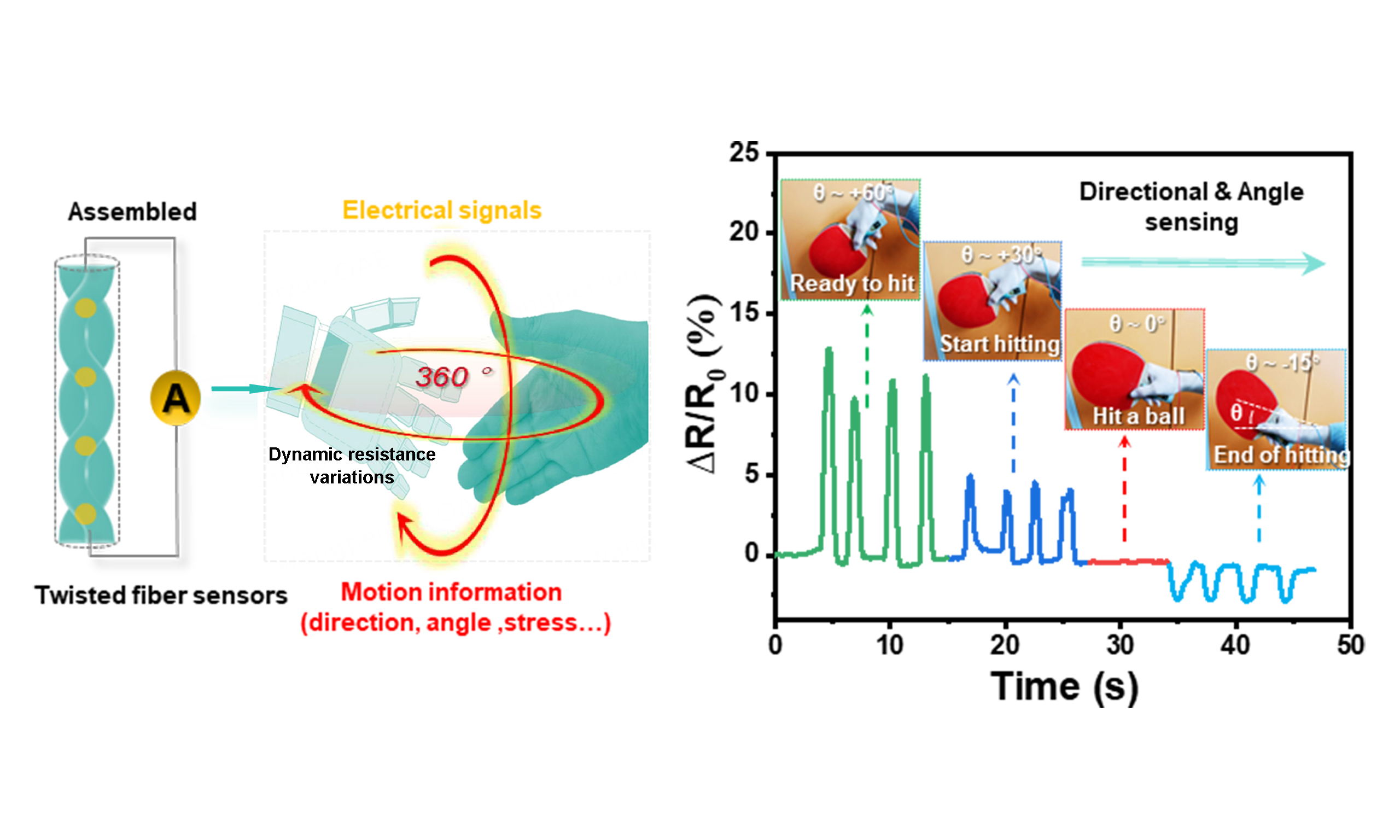
In recent years, monitoring human joint movements - particularly finger flexion and wrist articulation - has gained significant traction in rehabilitation therapies and diagnostic systems[35,36]. Therefore, in this final section, we present a pre-twisted fiber-based multifunctional motion-sensing platform with tripartite applications: athletic performance optimization, handwriting posture correction, and encrypted communication protocols. Figure 5A demonstrates the TSF can be attached to the human wrist for tracking real-time relative resistance across four motion stages of ping-pong sport. The obtained resistance profiles exhibit strong correlation with angular displacement (θ) and rotational dynamics, confirming directional sensitivity during activities of daily living. Building on these demonstrated capabilities, we propose extending conventional motion detection paradigms to novel domains such as calligraphic ergonomic assessment. Figure 5B illustrates hands holding a pen with embedded sensors that combine real-time postural monitoring with corrective feedback mechanisms, where strain-induced resistance modulations enable quantitative analysis of writing biomechanics. The wrist’s dynamic changes during writing, where the strain sensor records regular resistance changes, are useful for correcting writing posture by analyzing pen control.
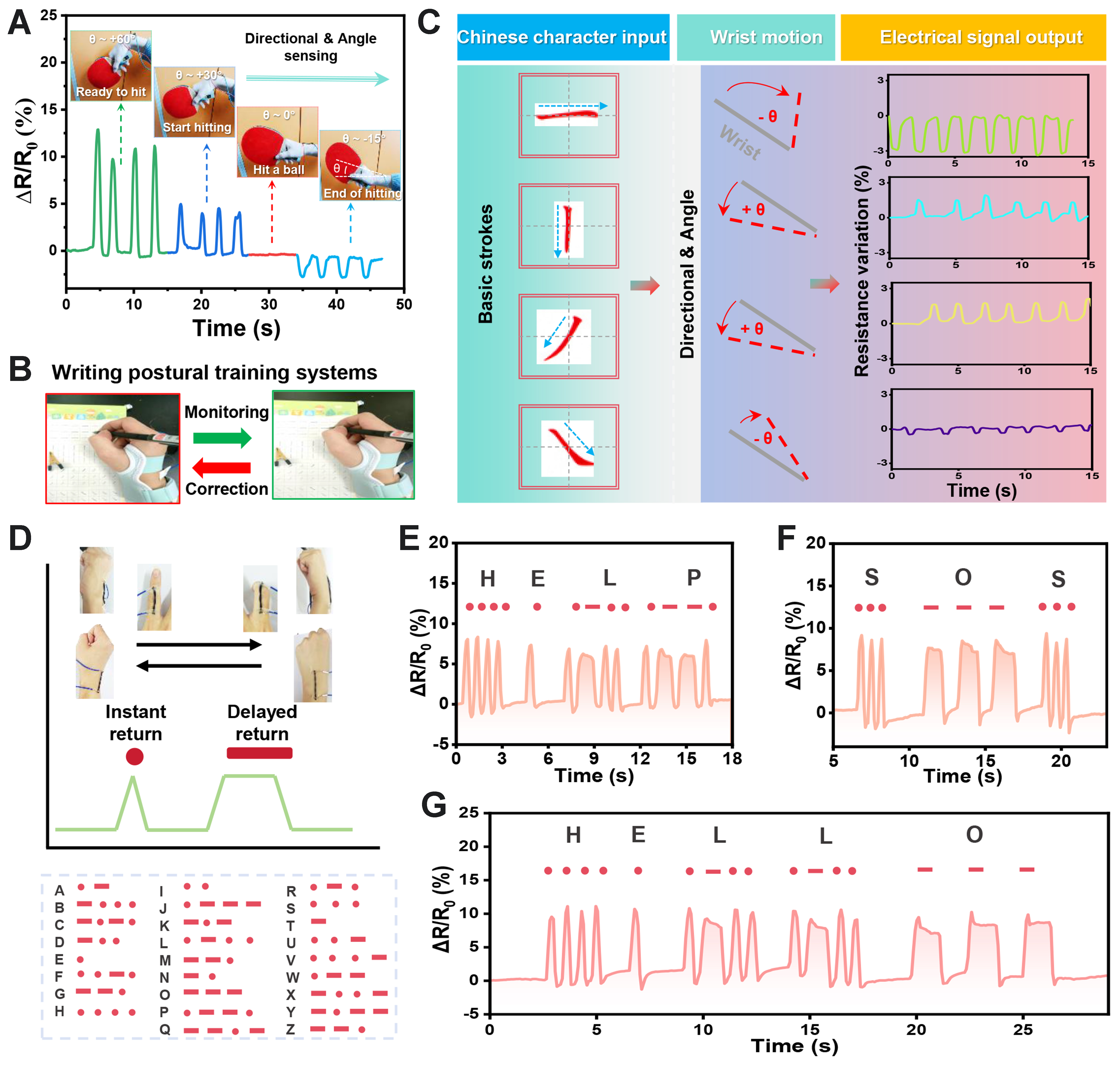
Figure 5. Potential sensing applications. (A) Directional and angular sensing in ball-hitting; (B) Proposed writing-posture monitoring/correction for an ideal wearable electronic training system; (C) A proof of concept for wrist motion-character writing correlation; (D) Morse-code-inspired communication with instant and delayed hand-motion; (E-G) Outputting words such as “HELP”, “SOS”, and “HELLO” using Morse codes.
Our proof-of-concept implementation [Figure 5C] reveals measurable success in overcoming implementation challenges through two key metrics: directional sensing resolution (ΔR/R0 variance < 2.5% at ±90°) and stroke-character mapping accuracy (high recognition rate for simple Chinese logographs). Despite the substantial implementation challenges inherent to these innovations for complex Chinese characters, our exploratory pilot experiments yielded promising preliminary outcomes, particularly in angular resolution sensing and motion-character mapping accuracy. Moreover, inspired by cryptographic encoding principles, Figure 5D introduces a motion-based encryption scheme comparing instant vs. delayed signal return profiles. Several motion-encoded signals were generated and the ΔR/R0 signals corresponding to letter sequences (e.g., “HELP”, “SOS”, “HELLO”) were displayed in Figure 5E-G, respectively. This foundational work demonstrates lexical communication through standardized ΔR/R0 patterns for augmentative communication systems in speech pathology. Ultimately, these feasibility studies validate the TSF platform’s multifunctional capabilities: directional sensitivity (R2 > 0.98 across test conditions), sub-50 ms motion tracking latency, and 98% signal reproducibility over five hundred cycles. The demonstrated technical achievements position this technology as a viable candidate for next-generation assistive devices in neurological rehabilitation and communication disorder interventions.
CONCLUSION
In conclusion, a TSF combining with a novel pre-twisted structural design successfully addresses the challenge of multi-directional spatial sensing in wearable sensors. Experimental results indicate the ionic crosslinks and physical entanglement of SA, Agar, and CNTs, significantly enhance the mechanical strength, water retention, and conductivity of the composite gel fibers. The integration of the internal stress within the hydrogel enhances its ability to detect pressure signals with directional sensitivity. The CNT fillers and dual-network structure ensure robust mechanical properties and conductivity, while the twisted design provides the necessary internal stress for effective direction sensing. The triple-network TSF system establishes three transformative advances in flexible sensing technology: (i) the helical fiber architecture overcomes conventional hydrogel anisotropy through twist-programmable directional sensitivity (56%-130% enhancement of GF), enabling complex motion detection in rotational and tensile modes; (ii) the integrated sensing platform demonstrates cross-domain applicability, from athletic biomechanics to Chinese character writing correlation, outperforming existing ionic sensors in multifunctionality; (iii) the motion-encoded information pioneers an encrypted communication protocol through delay-modulated ΔR/R0 patterns, achieving combinatorial security for assistive speech technology. These innovations position TSF as a paradigm-shifting solution for next-generation wearables, particularly in neurological rehabilitation and augmentative communication systems. Future work will focus on miniaturizing sensor nodes and integrating machine learning algorithms for adaptive motion decoding - critical steps toward clinical translation. By harmonizing molecular-scale network design with macroscale helical engineering, this study provides a blueprint for developing hydrogel-based devices that bridge the gap between laboratory innovation and real-world healthcare applications.
DECLARATIONS
Acknowledgments
The authors would like to thank the Analytical and Testing Center of Wuhan Textile University for providing partial support for this project.
Authors’ contributions
Conception of the idea, experimental design, and supervision of the research project: Yan, K.; Wang, D.
Conduct of the experiments and manufacturing and characterization of the fiber sample: Xing, J.; Yi, X.; Qu, Y.
Data analysis and manuscript writing: Yan, K.; Xing, J.
Contribution to the experiments and manuscript discussion: Xing, J.; Yi, X.; Yang, C.; Wang, W.; Wang, D.
Availability of data and materials
All data are available in the main text or the Supplementary Materials. Information requests should be directed to the corresponding authors.
Financial support and sponsorship
This work has been supported by the financial support of the National Natural Science Foundation (Nos. 51803154, 52373063).
Conflicts of interest
All authors declared that there are no conflicts of interest.
Ethical approval and consent to participate
This study only conducted non-invasive data collection through simply placing the device on the skin, and does not involve invasive procedures or human health risks. According to Article 32 of the “Measures for the Ethical Review of Life Science and Medical Research Involving Human Subjects (Trial)”, this study meets the conditions for exemption from review. All participants were informed about the experimental procedure and signed the informed consent forms prior to participation.
Consent for publication
Not applicable.
Copyright
© The Author(s) 2025.
Supplementary Materials
REFERENCES
1. Wei, R.; Li, H.; Chen, Z.; Hua, Q.; Shen, G.; Jiang, K. Revolutionizing wearable technology: advanced fabrication techniques for body-conformable electronics. npj. Flex. Electron. 2024, 8, 370.
2. Nong, H.; Jin, M.; Pan, C.; et al. Intelligent sensing technologies based on flexible wearable sensors: a review. IEEE. Sens. J. 2024, 24, 22197-217.
3. Liu, F.; Lorenzelli, L. Toward all flexible sensing systems for next-generation wearables. Wearable. Electron. 2024, 1, 137-49.
4. Li, J.; Bi, X.; Zhou, B.; Yang, S.; Yu, C. Nanocellulose-toughened super-stretchable ionic conductive gel fibers for wearable strain sensors. Int. J. Biol. Macromol. 2025, 299, 140227.
5. Mo, F.; Zhou, P.; Lin, S.; Zhong, J.; Wang, Y. A review of conductive hydrogel-based wearable temperature sensors. Adv. Healthc. Mater. 2024, 13, e2401503.
6. Guo, W.; Ma, M. Conductive nanocomposite hydrogels for flexible wearable sensors. J. Mater. Chem. A. 2024, 12, 9371-99.
7. Wang, L.; Xu, T.; Zhang, X. Multifunctional conductive hydrogel-based flexible wearable sensors. TrAC. Trends. Anal. Chem. 2021, 134, 116130.
8. Ouyang, Z.; Xu, D.; Yu, H.; Li, S.; Song, Y.; Tam, K. C. Novel ultrasonic-coating technology to design robust, highly sensitive and wearable textile sensors with conductive nanocelluloses. Chem. Eng. J. 2022, 428, 131289.
9. Wang, Z.; Xu, X.; Zhang, K.; et al. Continuous phase separation induced tough hydrogel fibers with ultrahigh conductivity for multidimensional soft electronics. Adv. Funct. Mater. 2025, 35, 2413478.
10. Wang, Z.; Xu, X.; Tan, R.; Zhang, S.; Zhang, K.; Hu, J. Hierarchically structured hydrogel composites with ultra‐high conductivity for soft electronics. Adv. Funct. Mater. 2024, 34, 2312667.
11. Yan, X.; Zhao, R.; Lin, H.; Zhao, Z.; Song, S.; Wang, Y. Nucleobase‐driven wearable ionogel electronics for long‐term human motion detection and electrophysiological signal monitoring. Adv. Funct. Mater. 2025, 35, 2412244.
12. Li, Y.; Feng, X.; Zhu, L.; et al. High performance fiber-constrained plasticized PVC gel actuators for soft robotics. Sens. Actuators. B. Chem. 2023, 393, 134177.
13. Hyun, J. E.; Lim, T.; Kim, S. H.; Lee, J. H. Wearable ion gel based pressure sensor with high sensitivity and ultra-wide sensing range for human motion detection. Chem. Eng. J. 2024, 484, 149464.
14. Ma, B.; Huang, K.; Chen, G.; et al. A dual-mode wearable sensor with coupled ion and pressure sensing. Soft. Sci. 2024, 4, 8.
15. Lei, T.; Wang, Y.; Feng, Y.; et al. PNIPAAm-based temperature responsive ionic conductive hydrogels for flexible strain and temperature sensing. J. Colloid. Interface. Sci. 2025, 678, 726-41.
16. Zhong, L.; Zhang, Y.; Liu, F.; et al. Muscle-inspired anisotropic carboxymethyl cellulose-based double-network conductive hydrogels for flexible strain sensors. Int. J. Biol. Macromol. 2023, 248, 125973.
17. Wang, K.; Shen, Y.; Wang, T.; et al. An ultrahigh-strength braided smart yarn for wearable individual sensing and protection. Adv. Fiber. Mater. 2024, 6, 786-97.
18. Lu, H.; Zhang, Y.; Zhu, M.; et al. Intelligent perceptual textiles based on ionic-conductive and strong silk fibers. Nat. Commun. 2024, 15, 3289.
19. Xu, D.; Ouyang, Z.; Dong, Y.; et al. Robust, breathable and flexible smart textiles as multifunctional sensor and heater for personal health management. Adv. Fiber. Mater. 2023, 5, 282-95.
20. Zhang, Y.; Zhang, R.; Tao, Y. Conductive, water-retaining and knittable hydrogel fiber from xanthan gum and aniline tetramer modified-polysaccharide for strain and pressure sensors. Carbohydr. Polym. 2023, 321, 121300.
21. Xie, Y.; Lv, X.; Li, Y.; et al. Carbon nanotubes and silica@polyaniline core-shell particles synergistically enhance the toughness and electrical conductivity in hydrophobic associated hydrogels. Langmuir 2023, 39, 1299-308.
22. Li, J.; Wan, K.; Zhu, T.; et al. Fibrous conductive metallogels with hybrid electron/ion networks for boosted extreme sensitivity and high linearity strain sensor. Macromol. Rapid. Commun. 2024, 45, e2300568.
23. Lee, J. H.; Nam, I.; Hyun, J. E.; Ahn, H.; Yeo, S. Y.; Lim, T. Conductive and robust cellulose hydrogel generated by liquid metal for biomedical applications. ACS. Appl. Polym. Mater. 2024, 6, 49-58.
24. Fu, Y.; Wang, Z.; Wu, K.; et al. Bio-inspired multifunctional hydrogels with adhesive, anti-bacterial, anti-icing and sensing properties. Chin. Chem. Lett. 2025, 36, 110479.
25. Zhang, C.; Yao, M.; Zhao, Y.; Nie, J.; He, Y. Spatial adjustment strategy to improve the sensitivity of ionogels for flexible sensors. Macromol. Chem. Phys. 2022, 223, 2200035.
26. Yang, P. A.; Cui, X.; Li, R.; et al. Highly sensitive and selective multidirectional flexible strain sensors with cross-shaped structure based on Fe NWs/graphene/interlock knit fabric for human activity monitoring. IEEE. Sens. J. 2023, 23, 23440-7.
27. Man, Y.; Liu, Y.; Miao, H.; et al. Stretchable and high sensitive ionic conductive hydrogel for the direction recognizable motion detection sensor. Giant 2023, 16, 100199.
28. Liu, Z.; Zhu, T.; Wang, J.; et al. Functionalized fiber-based strain sensors: pathway to next-generation wearable electronics. Nanomicro. Lett. 2022, 14, 61.
29. Xu, J.; Qiu, Z.; Yang, M.; et al. Stretchable transparent electrode via wettability self-assembly in mechanically induced self-cracking. ACS. Appl. Mater. Interfaces. 2021, 13, 52880-91.
30. Liu, Y.; Zhang, C.; Chen, Y.; Yin, R.; He, P.; Zhao, W. Rational design of conductive pathways in flexible tactile sensors via indirect 3D-printing of liquid metal for high-precision monitoring and recognition. ACS. Appl. Mater. Interfaces. 2023, 15, 38572-80.
31. Yuan, Y.; Yang, Q.; Wu, Q.; et al. In-situ copolymerization Ion-Gel-based flexible sensor for wearable dimethyl methylphosphonate detection. Sens. Actuators. B. Chem. 2024, 404, 135274.
32. Wan, Y.; Liu, H.; Yan, K.; Li, X.; Lu, Z.; Wang, D. An ionic/thermal-responsive agar/alginate wet-spun microfiber-shaped hydrogel combined with grooved/wrinkled surface patterns and multi-functions. Carbohydr. Polym. 2023, 304, 120501.
33. Zhang, Y.; Zhou, J.; Zhang, Y.; Zhang, D.; Yong, K. T.; Xiong, J. Elastic fibers/fabrics for wearables and bioelectronics. Adv. Sci. 2022, 9, e2203808.
34. Wang, Z.; Cong, Y.; Fu, J. Stretchable and tough conductive hydrogels for flexible pressure and strain sensors. J. Mater. Chem. B. 2020, 8, 3437-59.
35. Liu, D.; Huyan, C.; Wang, Z.; et al. Conductive polymer based hydrogels and their application in wearable sensors: a review. Mater. Horiz. 2023, 10, 2800-23.
Cite This Article
How to Cite
Download Citation
Export Citation File:
Type of Import
Tips on Downloading Citation
Citation Manager File Format
Type of Import
Direct Import: When the Direct Import option is selected (the default state), a dialogue box will give you the option to Save or Open the downloaded citation data. Choosing Open will either launch your citation manager or give you a choice of applications with which to use the metadata. The Save option saves the file locally for later use.
Indirect Import: When the Indirect Import option is selected, the metadata is displayed and may be copied and pasted as needed.
About This Article
Copyright

Data & Comments
Data
0












Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at [email protected].