

Consensus of heterogeneous second-order nonlinear multi-agent systems via pinning sampling control
 0
0 
Abstract
This paper investigates the consensus problem of heterogeneous second-order multi-agent systems (MASs) via sampling control. First, the corresponding error system is established based on the model of the MASs. Then, two types of control strategies are designed. In the first strategy, time-driven sampling control is adopted, whereas in the second strategy, event-triggered control is applied. Time-varying control gains are also considered. Furthermore, the Lyapunov functional method and matrix theory are used to deduce consensus criteria for second-order heterogeneous MASs under both sampling control and event-triggered control. In addition, since periodic sampling is included in the control strategies in this study, Zeno behavior is naturally avoided. Finally, two numerical examples are provided to demonstrate the validity of the designed control mechanisms.
Keywords
INTRODUCTION
Over the past few decades, with the widespread application of dynamical systems, increasing attention has been devoted to investigating their dynamic behaviors. Several theoretical results have been reported, including consensus tracking control for multi-agent systems (MASs) with linear nodal dynamics [1], robust non-fragile
MASs represent a prevalent class of dynamical systems with broad applications in robot cooperation [7], sensor networks [8], military applications [9], and other fields. Every agent in a MAS can be modeled as a node in a network, and consensus can be achieved with efficiently and flexibly through the exchange of local state information. In early studies on consensus in MASs, most researchers focused on position information as an influencing factor [10,11,12]. In subsequent research, to more accurately characterize agent dynamics, velocity information was incorporated alongside position information. This led to the development of second-order MASs [13,14,15]. Lu et al.[13] studied predefined-time consensus of second-order MASs subject to external disturbances using a predefined-time observer. Zhao et al.[14] proposed an event-triggered control strategy to investigate consensus in second-order discrete-time MASs influenced by the eigenvalues of the Laplacian matrix. Meng et al.[15] examined consensus in a double-integrator MAS under an undirected connected communication topology. The inclusion of velocity information has promoted the study of MAS models. In most existing studies, MAS dynamics are assumed to be homogeneous. However, such an assumption is often idealized, as agents in practical systems rarely exhibit identical dynamics. Compared with homogeneous systems, heterogeneous systems are more general and have higher theoretical significance. For heterogeneous MASs, simple linear feedback controllers cannot achieve complete consensus due to the inherent differences among agent dynamics. Achieving complete consensus would therefore require complex and costly control strategies. Accordingly, this paper focuses on quasi-consensus for second-order heterogeneous MASs, where the consensus errors are guaranteed to converge to a bounded range.
External controllers are essential for accelerating and facilitating consensus in heterogeneous systems. Common approaches include adaptive control [16], intermittent control [17], sampling control [18,19], impulsive control [20], and pinning control [21,22], which are used to address consensus problems in heterogeneous MASs. Specifically, adaptive control provides a strategy for handling time-varying parameters by continuously adjusting them through an adaptive law, thereby effectively regulating the system. In [16], optimal adaptive consensus tracking control for nonlinear MASs with prescribed performance is discussed, where the parameters in the adaptive protocol are adjusted based on the received output information. In practical digital computer systems, continuous signals cannot be directly utilized; instead, signal data must undergo processes such as discretization, sampling, compression, and decompression before they can be processed. Sampling control methods are widely used due to their ease of design and effective implementation in computer-controlled digital systems. For MAS, selecting an appropriate sampling control scheme is not only practical for data communication and controller execution, but also effective in significantly reducing system resource consumption. In [18], consensus of MASs is investigated using dynamic output feedback based on sampled data. Unlike impulsive control, which affects nodes only at discrete instants, sampling control can exert influence over continuous intervals based on sampled information. In [20], a consensus control strategy is proposed for a novel heuristic nonlinear MAS. Compared with previous studies, this research explores a control protocol that integrates both saturation effects and an impulsive control mechanism, demonstrating high efficiency, low cost, and broad applicability. In practice, to reduce control costs, it is common to control only a subset of agents rather than the entire system; this approach is referred to as pinning control. Hao et al.[21] investigated group consensus of MASs subject to external disturbances by constructing two pinning control algorithms. In [22], to address consensus in second-order nonlinear MASs under attacks, actuator failures, and integral quadratic constraints, an event-triggered pinning scheme based on local information was designed. To further reduce costs, sampling control is often combined with pinning control, thereby reducing both control effort and the number of controlled nodes.
In addition to the above control methods, there is another type of controller, namely event-triggered control, which has received significant attention in recent years. Such a controller determines the triggering instants based on predefined event conditions and can achieve consensus while reducing resource consumption and cost by effectively decreasing the number of sampling instances. For example, Yang et al.[23] adopted event-triggered control in their research on nonlinear MASs under limited communication resources. Li et al.[24] also presented an event-triggered control strategy for time-varying MASs to address parameter uncertainties within a given finite horizon and deception attacks. More recently, to better reflect practical scenarios, dynamic event-triggered control strategies have been proposed [25,26]. Furthermore, studies [22] and [27] have combined pinning control and sampling control with event-triggered control to reach consensus in MASs. In [22], the authors mainly focus on cluster consensus in the presence of acyclic denial-of-service (DoS) attacks, actuator failures, and integral quadratic constraints. In [27], the synchronization problem of first-order MASs with time-varying control gains is investigated under a synchronous periodic sampling framework. However, it does not consider factors such as network attacks or actuator faults; instead, it mainly addresses the synchronization control of nonlinear agents based on sampled data in directed topologies. In addition, in [28], the authors propose both an observer-based event-triggered controller and an observer-based full asynchronous event-triggered controller to study the bipartite consensus problem of MASs under unknown false data injection attack. Event-triggered control has been widely applied in the field of control systems. It can be used not only in consensus studies of MASs but also in investigating annular finite-time
In this work, by leveraging the advantages of event-triggered control, sampling control, and pinning control, two novel hybrid controllers are designed to achieve consensus in heterogeneous second-order nonlinear MASs. The effectiveness of the proposed methods is demonstrated through numerical examples. Furthermore, the main contributions of this paper are summarized below.
(ⅰ) At present, there is limited literature on consensus in heterogeneous second-order MASs. In this paper, by studying such systems, sufficient criteria for achieving consensus are established.
(ⅱ) Although hybrid controllers have made great progress in the past decade, there remains room for improvement in their application to heterogeneous second-order MASs. By integrating event-triggered control, sampling control, and pinning control, the control duration, the number of sampling instances, and the number of controlled nodes are reduced, thereby saving resources.
(ⅲ) The sampling control adopted in this paper effectively avoids Zeno behavior. It is important to note that since triggering instants occur only at sampling instants, the lower bound of the inter-event times is equal to the sampling period.
PRELIMINARIES
In this section, the notation and models for a heterogeneous second-order MAS comprising one leader and N followers are presented.
Notations
The symbols
Model description
Consider a second-order heterogeneous nonlinear MAS composed of one leader and N followers. The first N agents are followers, and the
The dynamics of the N followers are modeled by
Let
and
where
MAIN RESULTS
This section designs pinning sampling controllers to achieve consensus in heterogeneous second-order nonlinear MASs (1) and (2). The investigation is divided into two subsections: consensus under sampling control and consensus under hybrid event-triggered sampling control. Furthermore, a detailed derivation of the consensus process for the MASs is given below.
Leader-follower consensus under sampling control
Define the consensus errors as
for
where
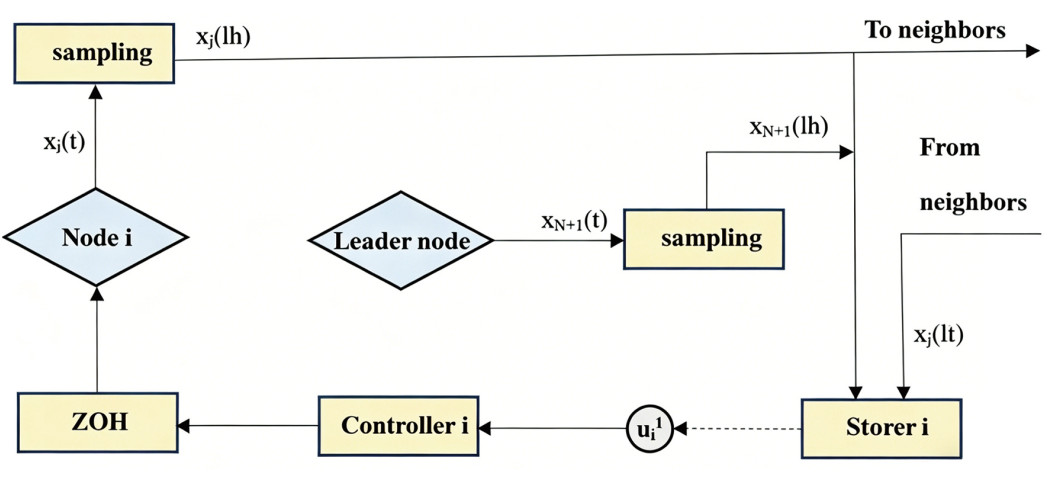
Figure 1. Flowchart of sampling control
Given that
where
Assumption 1. The function H in (7) satisfies the global Lipschitz condition, that is,
where
Assumption 2. The leader state is bounded, which implies that the function
Remark 1. The global Lipschitz condition in Assumption 1 is a standard assumption for deriving explicit stability criteria. In practice, for locally Lipschitz nonlinear systems, this condition can be interpreted as requiring a sufficiently large Lipschitz constant valid over the bounded operational region ensured by the closed-loop system. For systems exhibiting unbounded nonlinear growth, techniques such as input saturation may be introduced to guarantee boundedness.
Remark 2. The leader's state may correspond to a stable equilibrium, periodic orbit, or chaotic attractor. Therefore, it is reasonable to assume that the leader state is bounded. Since
Remark 3. As for pinning control, the selection of pinned nodes is crucial. If the communication topology is disconnected, at least one node in each connected component should be pinned. Otherwise, any node can be selected as a pinned node. The pinning strength
Theorem 1. Under Assumptions 1-2 and controller (6), the MASs (1) and (2) can achieve quasi-consensus exponentially if there exist a constant
and
where
Proof. For
Then, we obtain
and
Furthermore, we have
and
Similarly, we obtain the following deduction,
and
Applying (11)-(18) yields
where
By Theorem 2.3 in [30], we obtain
Therefore, the heterogeneous second-order MASs (1) and (2) can realize quasi-consensus.
Remark 4. Notably, the matrix blocks C and J in matrix
Remark 5. The coupling strengths
Lead-following consensus under event-triggered control
In this subsection, a hybrid control strategy that combines the controller in (6) with an event-triggered mechanism is represented as follows
where
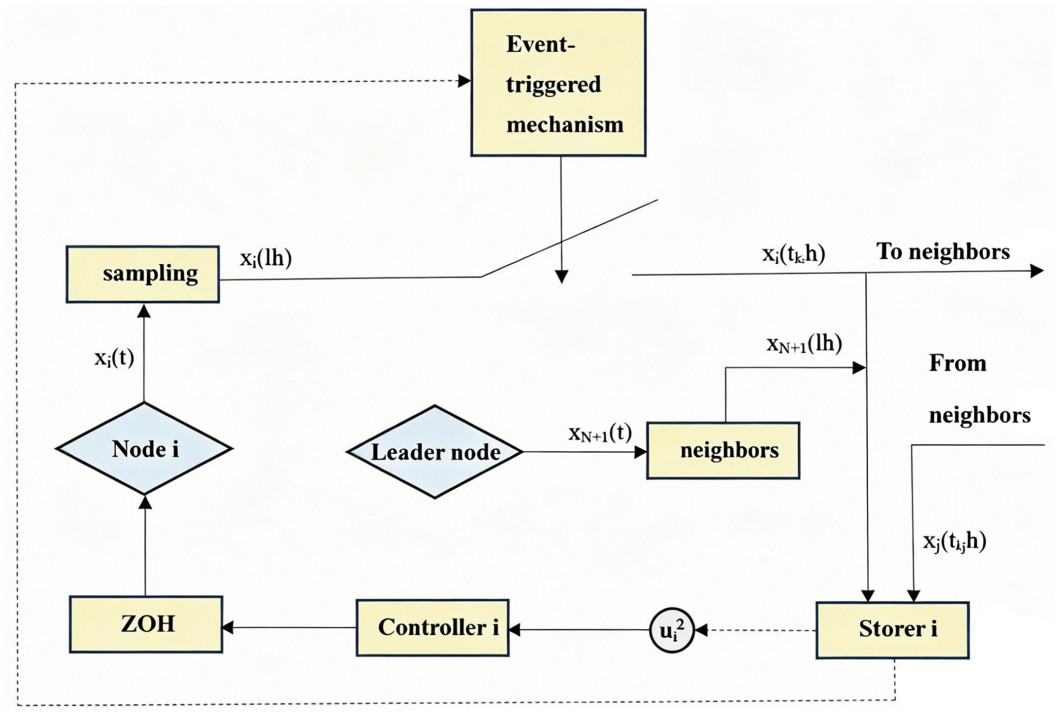
Figure 2. Flowchart of the event-triggered control
Define
where
Furthermore, the triggering instant
where
Theorem 2. Base on Assumptions 1-2 and controller (21), the MASs (1) and (2) can realize quasi-consensus exponentially if there is a constant
and
where
Proof. For
Taking the derivative of
Then, we have
In addition, we have
and
Applying (11)-(13), (15)-(17), and (28)-(30), and combining these with the event-triggered strategy (23), we obtain
where
The remainder of the proof is similar to that of Theorem 1. Therefore, the heterogeneous second-order MASs (1) and (2) can realize quasi-consensus.
Remark 6. Since heterogeneous systems are considered in this paper, quasi-consensus is analyzed in both Theorem 1 and Theorem 2. According to (20), the upper bound of the error
Remark 7. The threshold parameters
SIMULATIONS
This section provides two examples to explain the above results. Specifically, Theorem 1 and Theorem 2 are illustrated in Example 1 and Example 2, respectively. In addition, both connected and disconnected graphs are discussed in the two examples. Consider systems (1) and (2) with
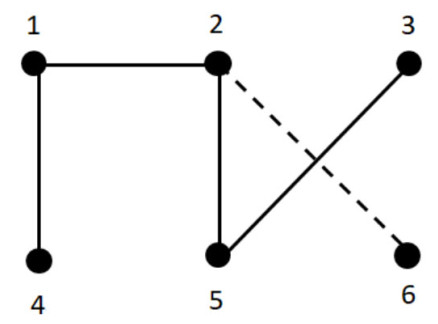
Figure 3. Second-order heterogeneous MASs over a connected graph.
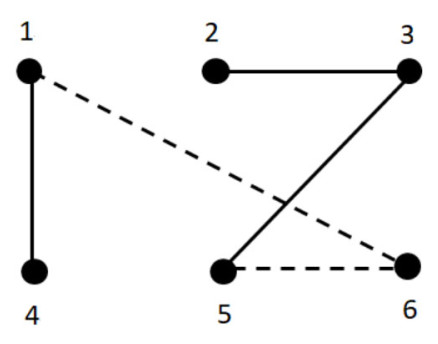
Figure 4. Second-order heterogeneous MASs over a disconnected graph.
Moreover, the pinning strength matrices
Example 1 Lead-following consensus under time-driven sampling control
In this example, consensus of systems (1)-(2) is simulated using controller (6), which does not include event-triggered control. Figures 5 and 6 show the consensus error trajectories of the position and velocity states of six nodes in a connected network. Correspondingly, Figures 7 and 8 sketch the consensus error trajectories for a disconnected network. As shown in Figures 5-8, the heterogeneous second-order MASs eventually achieve consensus.
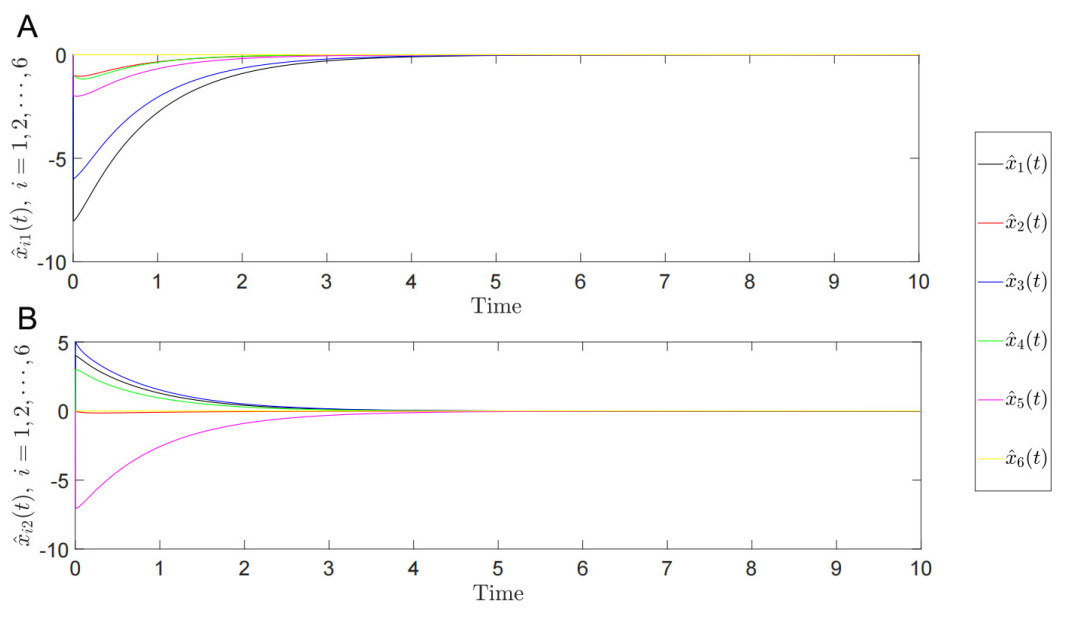
Figure 5. Error trajectories of (A) the first component and (B) the second component of the nodes' position over the connected graph.
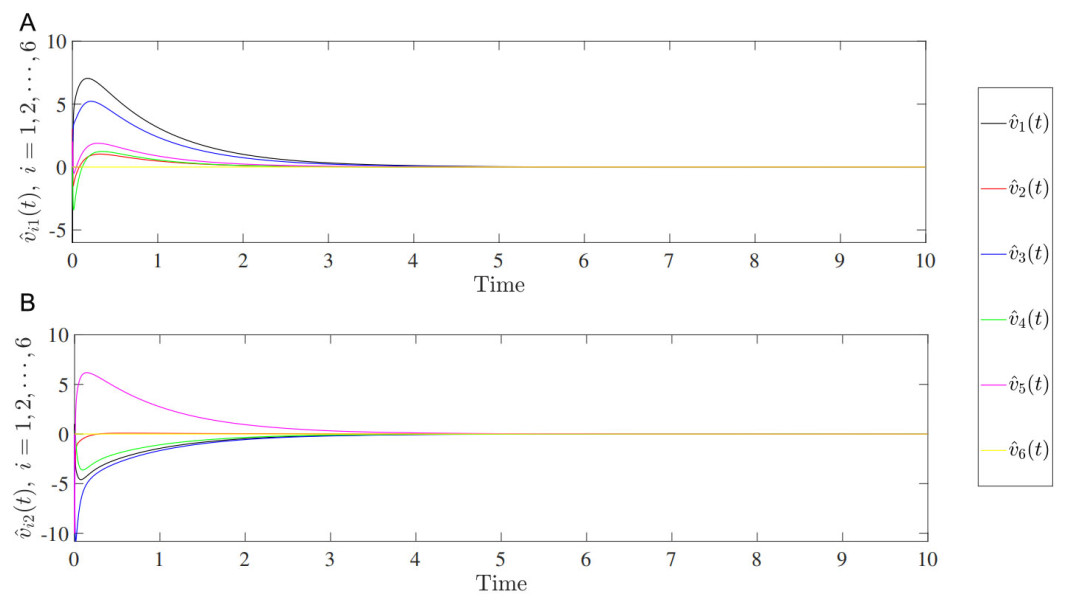
Figure 6. Error trajectories of (A) the first component and (B) the second component of the nodes' velocity over the connected graph.
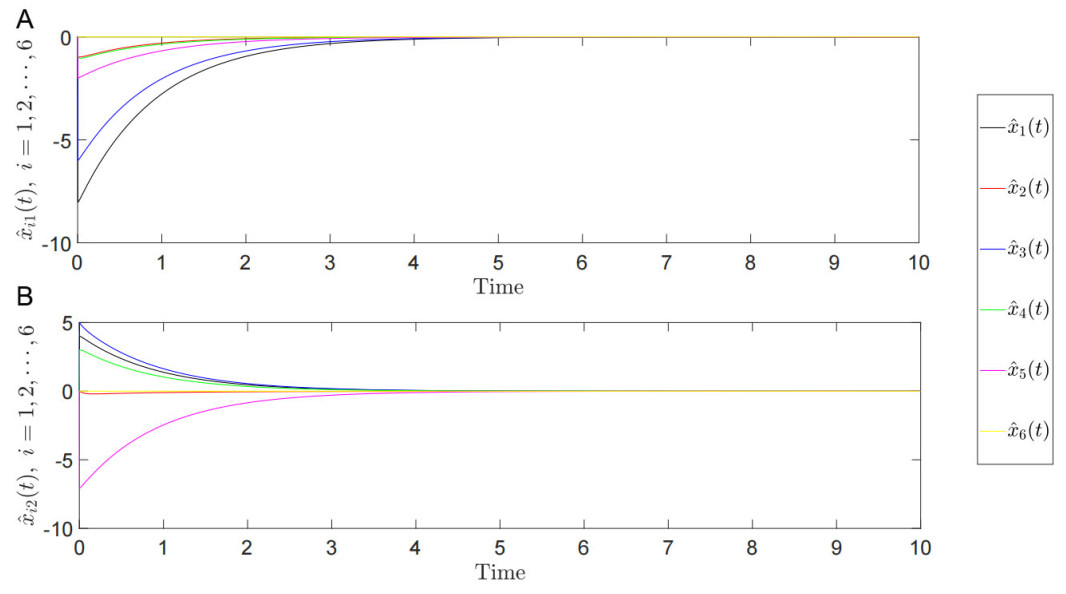
Figure 7. Error trajectories of (A) the first component and (B) the second component of the nodes' position over the disconnected graph.
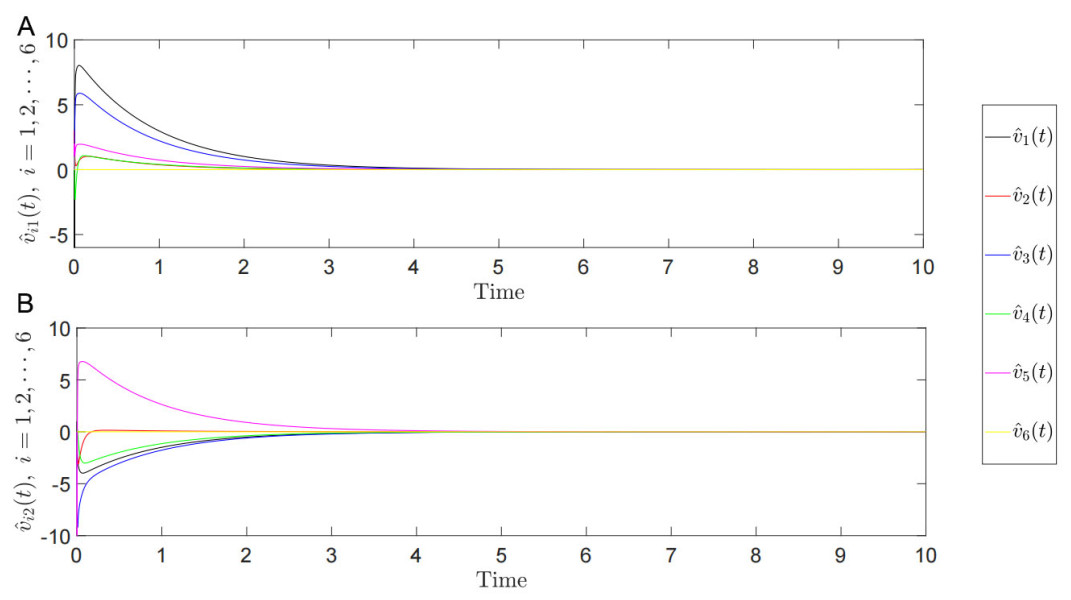
Figure 8. Error trajectories of (A) the first component and (B) the second component of the nodes' velocity over the disconnected graph.
In the following, the error trajectories of the position and velocity states of the nodes under the disconnected topology are presented. In a disconnected graph, the leader node needs to pin at least one node in each connected component to ensure that all nodes can achieve consensus. Under the same initial conditions in Example 1, a comparison between connected and disconnected graphs is conducted. The results show that consensus is achieved by all nodes at approximately
Remark 8. The sampling period h is a fundamental design parameter that significantly affects both the theoretical guarantees and the practical performance of the control system. Its role is twofold and closely integrated within the closed-loop dynamics. First, from a stability perspective, h is not merely an implementation constant but appears intrinsically within the sufficient conditions for consensus. In the subsequent Lyapunov analysis, the discretization errors introduced by the sampled-data control, such as
Example 2 Lead-following consensus under event-triggered control
In this example, the consensus of the systems (1) and (2) is simulated via the event-triggered control strategy (21). Figure 9 shows the triggering instants over the connected graph when the nodes in the MASs reach consensus. From Figure 9, it can be observed that the number of triggering instants evolves from sparse to dense, which is related to the designed triggering function (23). Moreover, Figures 10 and 11 show that the error trajectories of the MASs converge to consensus under the event-triggered mechanism. Correspondingly, Figures 12 and 13 present the consensus error trajectories under the event-triggered mechanism over the disconnected network. Figure 14 shows the triggering instants over the disconnected graph when the nodes in the MASs reach consensus.
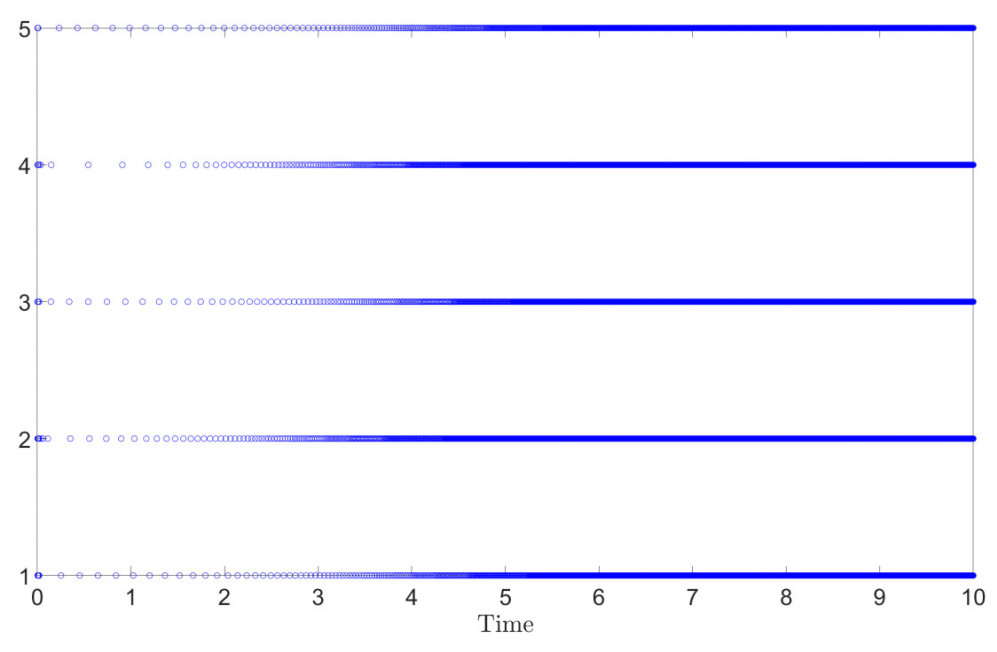
Figure 9. The triggering instants of control (21) over the connected graph.
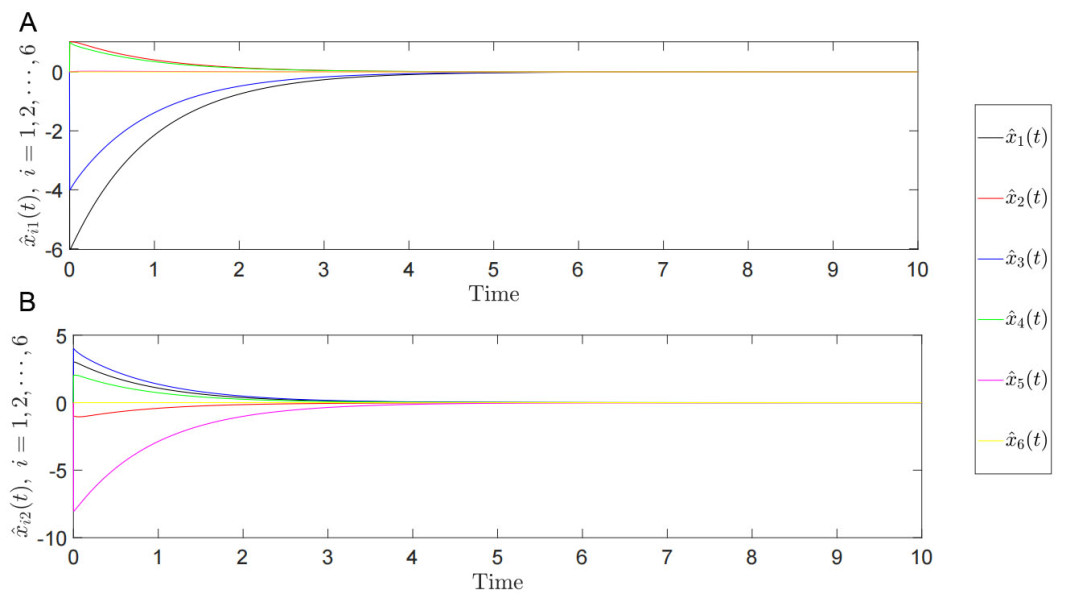
Figure 10. Error trajectories of (a) the first component and (b) the second component of the nodes' positions over the connected graph under control 21.
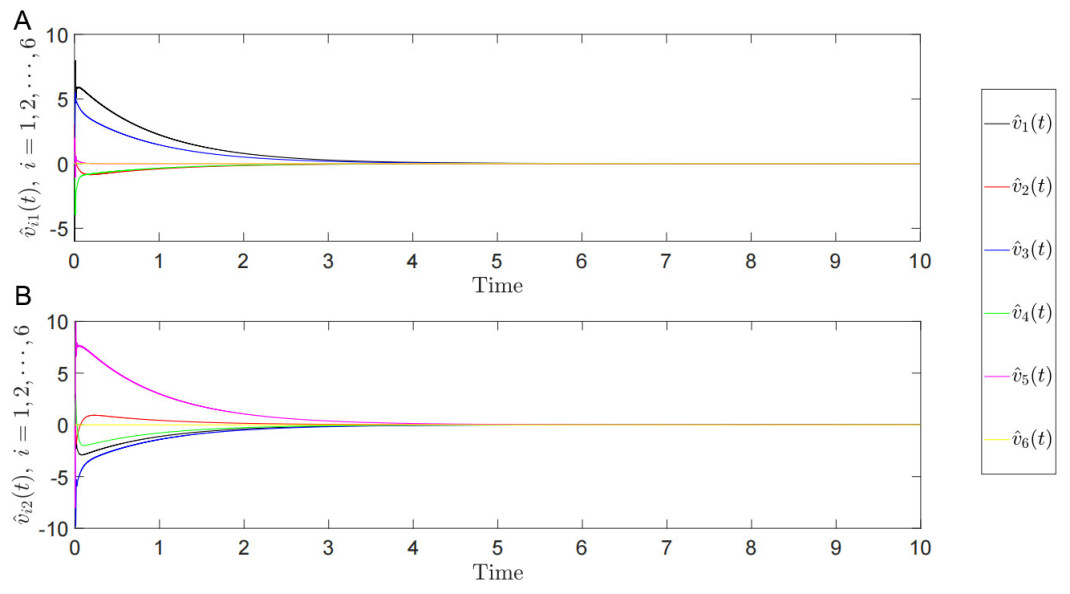
Figure 11. Error trajectories of (A) the first component and (B) the second component of the nodes' velocities over the connected graph under control 21.
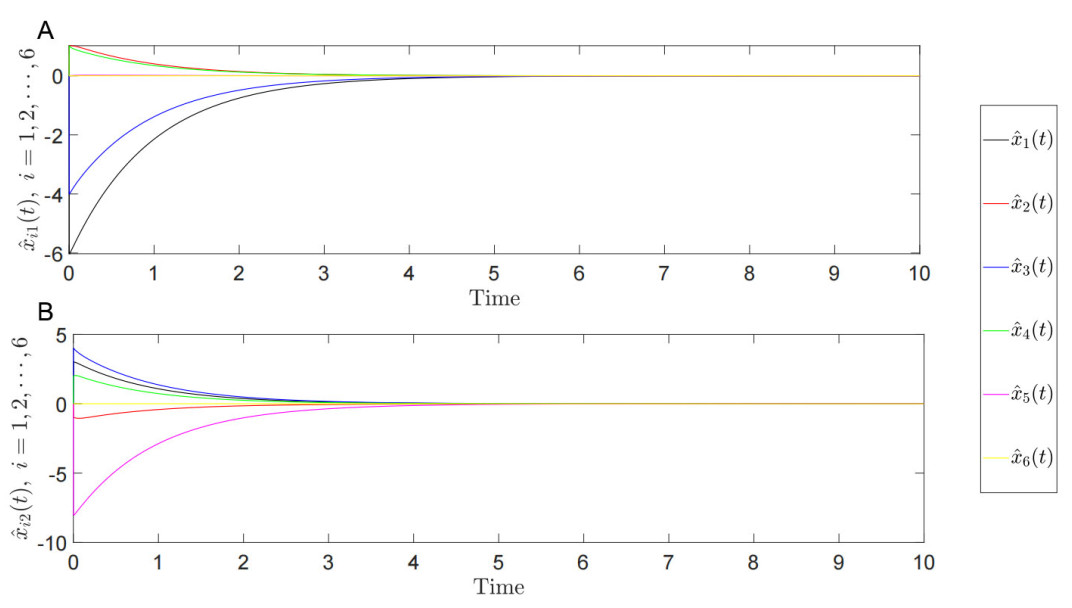
Figure 12. Error trajectories of (A) the first component and (B) the second component of the nodes' positions over the disconnected graph under control 21.
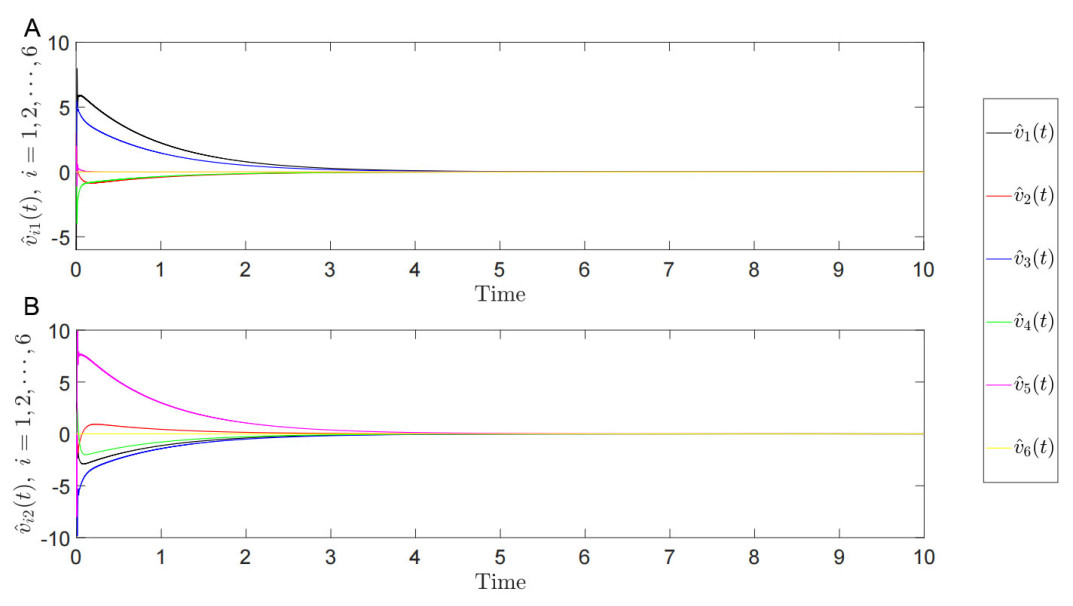
Figure 13. Error trajectories of (A) the first component and (B) the second component of the nodes' velocities over the disconnected graph under control 21.
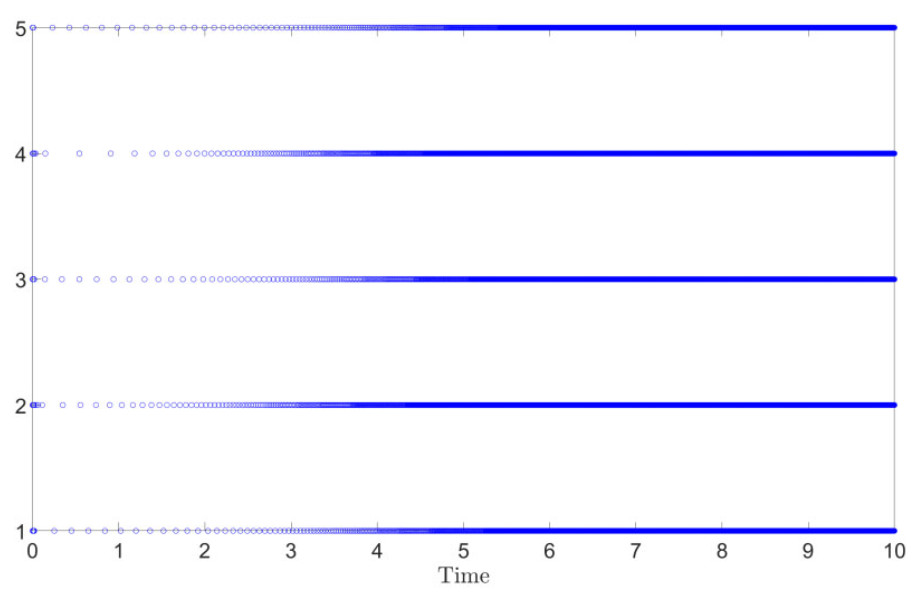
Figure 14. The triggering instants of control 21 over the disconnected graph.
Remark 9. It is worth noting from Figures 9 and 14 in this example that Zeno behavior does not occur, although the triggering becomes more frequent over time. Since sampling control is applied in both control schemes designed in this paper, and triggering instants are restricted to occur only at sampling instants, Zeno behavior can be naturally excluded.
The difference between Example 1 and Example 2 is the error trajectories of each node under different controllers. The controller used in Example 1 is a sampling controller, whereas Example 2 employs a sampling-based event-triggered control mechanism. The results shown in the above figures indicate that the nodes can achieve consensus under both controllers. In addition, the system considered in this paper is a heterogeneous MAS, meaning that the dynamics of each agent are different. As a result, achieving complete consensus is more challenging. In the numerical simulations, the consensus errors of the position and velocity states remain within a small upper bound, indicating that the heterogeneous MAS can still achieve satisfactory consensus.
Remark 10. The controller in Theorem 2 extends the sampling-based controller in Theorem 1 by introducing an event-triggered mechanism, such that control updates are applied only at triggering instants, thereby reducing communication costs to some extent. The controller in this subsection is shown in (21). Since the consensus error eventually approaches zero, i.e.,
Remark 11. Research on consensus in MASs remains an active and significant area, with various methodologies continuously being developed. For instance, literature [20] studied a consensus strategy for a novel nonlinear MAS under DoS attacks, employing a saturated impulsive control mechanism and analyzing stability via Lyapunov theory and matrix measure theory. Literature [2] proposed a robust non-fragile
CONCLUSION
This work investigates the consensus problem for heterogeneous second-order MASs. To ensure consensus, the consensus problem in MASs was transformed into a stability problem of the corresponding error system. Subsequently, sufficient criteria for achieving quasi-consensus were derived using stability theory. It is worth noting that two control protocols were designed in this study. The difference between the two control strategies lies in whether an event-triggered mechanism is incorporated. The second controller introduces an event-triggered mechanism based on the design of the first controller, which could further reduce control cost. In addition, Zeno behavior does not occur, as a sampling mechanism is applied in the control strategies. The minimum lower bound of the event-triggered intervals is equal to the sampling period. Finally, numerical examples were presented to validate the derived theoretical results. The current analysis assumes the absence of external disturbances. However, the quasi-consensus framework is inherently robust to bounded disturbances, as such disturbances can be regarded as additional bounded inputs in the error dynamics, leading to an increase in the ultimate error bound. Future work will explicitly incorporate and analyze the effects of persistent external disturbances and design corresponding disturbance rejection mechanisms. Furthermore, the study of fully distributed algorithms and security control[29] for second-order networked systems remains both challenging and important, and these topics will be investigated in future work.
DECLARATIONS
Authors' contributions
Made substantial contributions to the conception and design of the study and performed data analysis and interpretation: Sun, S.; Wang, Z.
Performed data acquisition, as well as providing administrative, technical, and material support: Huang, C.; Feng, Y.; Xiao, M.
Availability of data and materials
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding authors.
AI and AI-assisted tools statement
Not applicable.
Financial support and sponsorship
This work was supported in part by the National Natural Science Foundation of China(Grant Nos. 62476138 and 42375016) and in part by the Postgraduate Research and Practice Innovation Program of Jiangsu Province (Grant KYCX23_0957).
Conflicts of interest
All authors declared that there are no conflicts of interest.
Ethical approval and consent to participate
Not applicable.
Consent for publication
Not applicable
Copyright
© The Author(s) 2026.
REFERENCES
1. Li, S.; Liang, K.; He, W. Fully distributed event-triggered secure consensus of general linear multi-agent systems under sequential scaling attacks. ISA. Trans. 2022, 127, 146-55.
2. Li, B.; Zhang, X.; Zhao, X. Robust nonfragile H∞ ffltering for fuzzy fractional order systems with uncertainties. Iran. J. Fuzzy. Syst. 2024, 21, 1-7.
3. Huang, C.; Li, H.; Cao, J. A novel strategy of bifurcation control for a delayed fractional predator–prey model. Appl. Math. Comput. 2019, 347, 808-38.
4. Parhami, P.; Fateh, M.; Rezvani, M. A comparison of deep neural network models for cluster cancer patients through somatic point mutations. J. Ambient. Intell. Human. Comput. 2022, 14, 10883-98.
5. Wang, X.; Taul, M. G.; Wu, H. Grid-synchronization stability of converter-based resources an overview. IEEE. Open. J. Ind. Applicat. 2020, 1, 115-34.
6. Hsieh, C. H.; Chen, Y. M. Fault tolerant consensus with multi-agent systems for distributed coordinated control algorithm in the energy internet network. J. Phys. Conf. Ser. 2019, 1267, 012079.
7. Chen, C.; Xie, K.; Lewis, F. L.; Xie, S.; Fierro, R. Adaptive synchronization of multi-agent systems with resilience to communication link faults. Automatica 2020, 111, 108636.
8. Mishra, M.; Poddar, P.; Agrawal, R.; Chen, J.; Tokekar, P.; Sujit, P. B. Multi-agent deep reinforcement learning for persistent monitoring with sensing, communication, and localization constraints. IEEE. Trans. Autom. Sci. Eng. 2025, 22, 2831-43.
9. Yang, Y.; Da, K.; Zhu, Y. Consensus based target tracking against deception jamming in distributed radar networks. IET. Radar. Sonar. Navi. 2023, 17, 683-700.
10. Nowzari, C.; Garcia, E.; Cortés, J. Event-triggered communication and control of networked systems for multi-agent consensus. Automatica 2019, 105, 1-27.
11. Dong, G.; Li, H.; Ma, H.; Lu, R. Finite-time consensus tracking neural network FTC of multi-agent systems. IEEE. Trans. Neural. Netw. Learn. Syst. 2020, 32, 653-62.
12. Zhang, L.; Li, Y.; Lou, J.; Lu, J. Bipartite asynchronous impulsive tracking consensus for multi-agent systems. Front. Inform. Technol. Electron. Eng. 2022, 23, 1522-32.
13. Lu, L.; Han, T.; Xiao, B.; Yan, H. Distributed observer-based predefined-time consensus control for second-order multi-agent systems. Circuits. Syst. Signal. Process. 2023, 42, 7099-116.
14. Zhao, D.; Dong, T.; Hu, W. Event-triggered consensus of discrete time second-order multi-agent network. Int. J. Control. Autom. Syst. 2018, 16, 87-96.
15. Meng, T.; Xie, Y.; Lin, Z. Consensus of second-order multi-agent systems under unknown but bounded measurement noises. Syst. Control. Lett. 2019, 133, 104517.
16. Yue, H.; Xia, J. Reinforcement learning-based optimal adaptive fuzzy control for nonlinear multi-agent systems with prescribed performance. Complex. Eng. Syst. 2023, 3, 19.
17. Shi, Y.; Hu, J.; Wu, Y.; Ghosh, B. K. Intermittent output tracking control of heterogeneous multi-agent systems over wide-area clustered communication networks. Nonlinear. Anal. Hybrid. Syst. 2023, 50, 101387.
18. Zhao, G.; Hua, C.; Liu, S. Sampled-data dynamic output feedback consensus control of multi-agent systems. IEEE. Trans. Network. Sci. Eng. 2022, 9, 3292-301.
19. Yu, L.; Cui, Y.; Lu, Z.; Liu, Y. Sampled-based bipartite tracking consensus of nonlinear multiagents subject to input saturation. Complex. Eng. Syst. 2022, 2, 6.
20. Hu, X.; Xiong, Y.; Zhang, Z.; Li, C. Consensus of a novel heuristic nonlinear multi-agent system in DOS attack network environment via saturation impulse control mechanism. ISA. Trans. 2021, 19, 200-8.
21. Hao, L.; Zhan, X.; Wu, J.; Han, T.; Yan, H. Fixed-time group consensus of nonlinear multi-agent systems via pinning control. Int. J. Control. Autom. Syst. 2021, 19, 200-8.
22. Guo, X.; Liu, P.; Wang, J.; Ahn, C. K. Event-triggered adaptive fault-tolerant pinning control for cluster consensus of heterogeneous nonlinear multi-agent systems under aperiodic DoS attacks. IEEE. Trans. Network. Sci. Eng. 2021, 8, 1941-56.
23. Yang, Y.; Qian, Y. Event-trigger-based recursive sliding-mode dynamic surface containment control with nonlinear gains for nonlinear multi-agent systems. Inf. Sci. 2021, 560, 202-16.
24. Li, X. M.; Zhou, Q.; Li, P.; Li, H.; Lu, R. Event-triggered consensus control for multi-agent systems against false data-injection attacks. IEEE. Trans. Cybern. 2019, 50, 1856-66.
25. Xiong, Y.; Li, Y.; Xiong, Z.; et al. Power-exponential and fixed-time consensus of conformable fractional-order quantum cellular neural networks via event-triggered control. Phys. Scr. 2024, 99, 065247.
26. Wang, Z.; Gao, Y.; Liu, Y.; Wang, S.; Wu, L. Distributed dynamic event-triggered communication and control for multi-agent consensus: a hybrid system approach. Inf. Sci. 2022, 618, 191-208.
27. Han, Z.; Tang, W. K. S.; Jia, Q. Event-triggered synchronization for nonlinear multi-agent systems with sampled data. IEEE. Trans. Circuits. Syst. I. 2020, 67, 3553-61.
28. Wang, Z.; Shi, S.; He, W.; Xiao, M.; Cao, J.; Gorbachev, S. Observer-based asynchronous event-triggered bipartite consensus of multi-agent systems under false data injection attacks. IEEE. Trans. Control. Netw. Syst. 2023, 10, 1603-15.
29. Kchaou, M.; Tajudeen, M. H. M.; Ali, M. S.; Perumal, R.; Priya, B.; Thakur, G. K. Annular finite-time stability for IT2 fuzzy networked switched system via non-fragile AETS under multiple attacks: application to tank reactor chemical process model. Expert. Syst. Appl. 2024, 255, 124552.
30. Wen, L.; Yu, Y.; Wang, W. Generalized Halanay inequalities for dissipativity of Volterra functional differential equations. J. Math. Anal. Appl. 2008, 347, 169-78.
31. Boyd, S.; El Ghaoui, L.; Feron, E. Linear matrix inequalities in system and control theory. SIAM Press; 1994. Available from: https://web.stanford.edu/~boyd/lmibook/lmibook.pdf [Last accessed on 17 Apr 2026].
Cite This Article
How to Cite
Download Citation
Export Citation File:
Type of Import
Tips on Downloading Citation
Citation Manager File Format
Type of Import
Direct Import: When the Direct Import option is selected (the default state), a dialogue box will give you the option to Save or Open the downloaded citation data. Choosing Open will either launch your citation manager or give you a choice of applications with which to use the metadata. The Save option saves the file locally for later use.
Indirect Import: When the Indirect Import option is selected, the metadata is displayed and may be copied and pasted as needed.
About This Article
Special Topic
Copyright

Data & Comments
Data
0












Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at [email protected].