

Figure8
From: Consensus of heterogeneous second-order nonlinear multi-agent systems via pinning sampling control
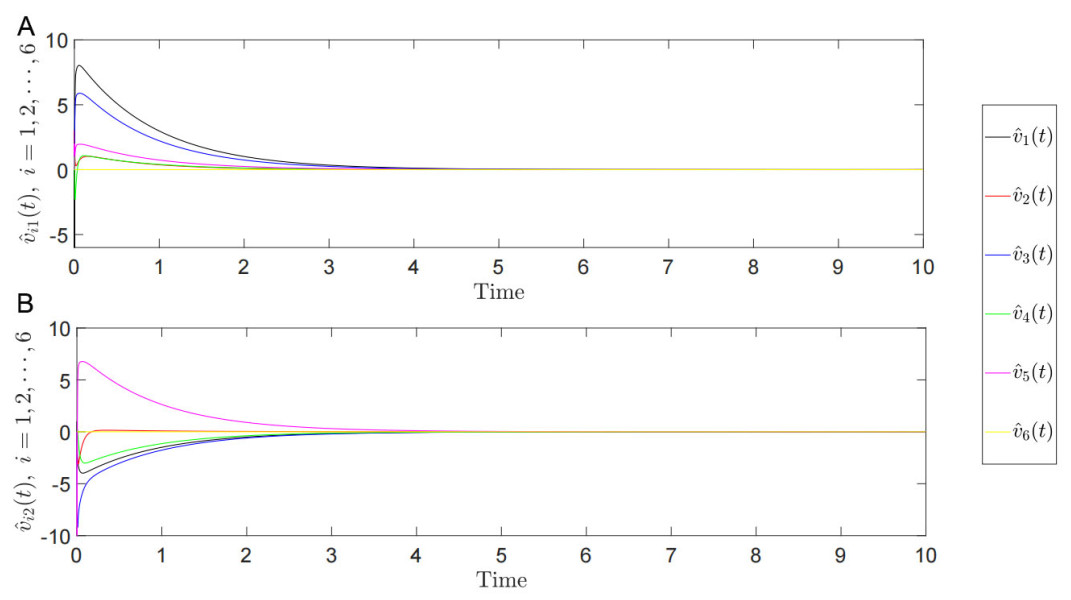
Figure 8. Error trajectories of (A) the first component and (B) the second component of the nodes' velocity over the disconnected graph.




