



fig2
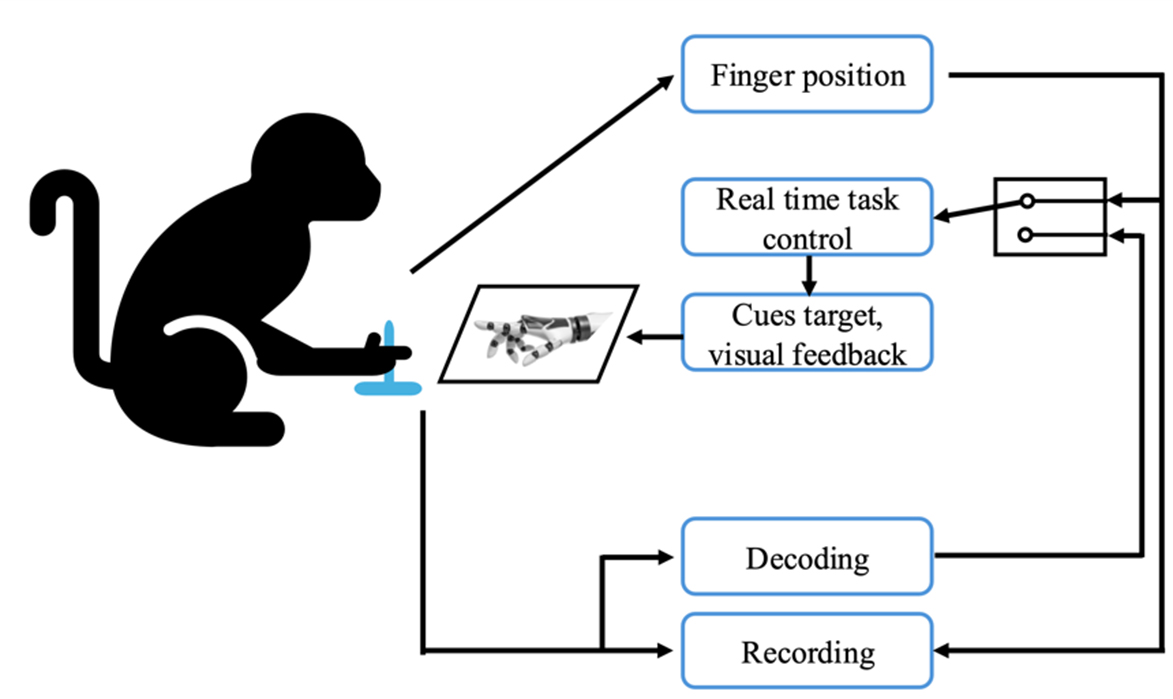
Figure 2. The NHP controlled a virtual hand model displayed on a monitor using a flex sensor attached to the index finger, with the goal of hitting and holding a spherical target to receive a reward, while also demonstrating the capability to control the virtual hand through real-time decoding of RPNI signals. NHP: Non-human primate; RPNI: Regenerative Peripheral Nerve Interface.




