

fig4
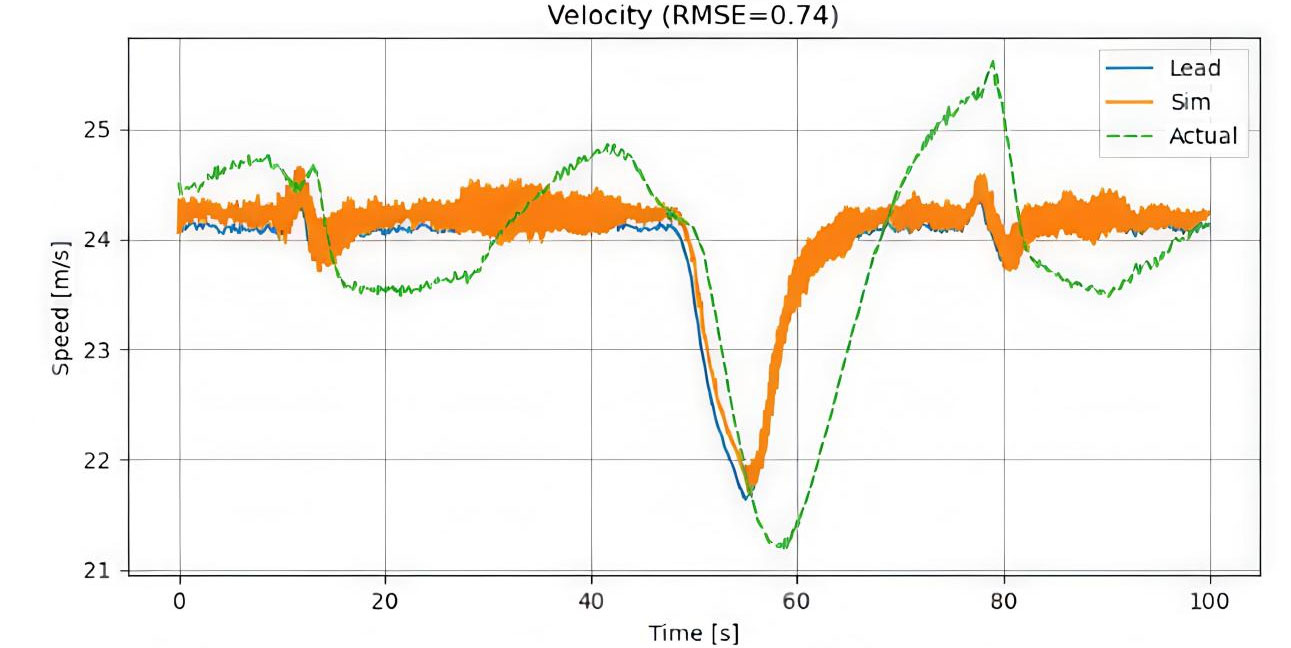
Figure 4. Comparison of actual and simulated velocity showing high-fidelity tracking. RMSE: Root-mean-square error.
Figure 4. Comparison of actual and simulated velocity showing high-fidelity tracking. RMSE: Root-mean-square error.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/

