



Mechanical marvels: robots in carotid artery stenting - a systematic review of effectiveness in neuroendovascular interventions

 , ,
, , Abstract
Aim: Carotid artery disease, or carotid stenosis, is a critical medical condition carrying the risk of stroke and fatality. The underlying pathology involves the accumulation of atheromatous plaques, leading to luminal constriction and disrupted blood flow. Endovascular interventions, such as carotid artery stenting (CAS), aim to restore vessel patency. Robotic assistance in CAS surgeries is rapidly evolving globally, offering precision and fatigue-free capabilities. Despite growing interest, a dedicated systematic review on robotic applications in CAS is notably absent.
Methods: Adhering to the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) guidelines, a comprehensive search strategy involving five databases. Data extraction encompassed study origin, patient demographics, procedural details, procedure times, complications, fluoroscopy, and radiation parameters.
Results: Over 199 articles were identified from five databases. Seven studies meeting inclusion criteria were analyzed. The predominant robotic system, CorPath GRX, demonstrated advantages such as remote operation, precision, and compatibility with various catheter sizes. Magellan Robotic System, employed in one study, showcased remote-controlled capabilities. These studies involved a total of 44 patients undergoing carotid artery stenosis procedures with robotic assistance. Reported complications included access site conversion, Angio-Seal device failure, and residual stenosis. Mean operation time varied from 34 to 85 min.
Conclusions: The integration of robotic assistance in carotid interventions, as demonstrated by the CorPath GRX and Magellan Robotic System, holds significant promise in improving the precision and safety of CAS procedures. However, the limited number of studies, the high risk of bias, and the need for further research and standardization highlight the evolving nature of this technology.
Keywords
INTRODUCTION
Carotid artery disease, also known as carotid stenosis, is a medical condition that poses the risk of stroke and fatality if left untreated. The underlying pathology involves the accumulation of atheromatous plaques - comprising fatty cholesterol deposits - in the carotid arteries, the primary vessels supplying blood to the brain, face, and associated structures of the head. While arteries normally facilitate undisturbed blood flow, the progression of stenosis, affecting either one or both carotid arteries, results in luminal constriction, disrupting the physiological rate of blood supply.
The prevalence of carotid stenosis ranges from 0.2% to 7.5% across diverse age groups[1,2]. Etiological factors encompass smoking, obesity, sedentary lifestyles, hypertension, elevated cholesterol levels, and diabetes. Treatment modalities involve surgical interventions, such as endovascular carotid artery stenting (CAS), aimed at restoring the patency of the occluded vessel and reinstating normal blood flow.
In the realm of surgical advancements, a rapidly evolving technology offers assistance to surgeons engaged in such procedures. Robots, integral to surgical practices since 1988, have revolutionized operating theaters globally[3]. These robotic systems allow for precision in maneuvers, are free from the limitations of human fatigue, and possess the capability to execute prolonged operations seamlessly. Their successful integration into various surgical domains, including cardiovascular surgery[4,5], underscores their transformative impact.
One of the recently employed devices is the CorPath GRX robotic platform [Figure 1], which was developed by Siemens Healthineers and Corindus[6]. Comprising a remote steering unit for the operator and a bedside platform for the patient, this innovative system offers distinct advantages. The remote steering unit, strategically placed in a separate room, effectively minimizes radiation exposure during surgery. The bedside component encompasses a cassette, robotic drive unit, and mechanical arm. The single-use cassette acts as a safe barrier between the robotic system and sterile interventional equipment, featuring a support track for guide catheters and a copilot. The system demonstrates compatibility with commonly used catheter sizes, 0.014- and 0.018-inch guidewires, rapid exchange catheters for angioplasty balloons, embolic protection devices, and more.

Figure 1. CorPath GRX system assisting in coronary intervention, reprinted with permission of Siemens Healthineers[6] (published with permission of Siemens Healthineers).
Thanks to the implementation of a mechanical transmission module, physicians can operate remotely with precision. This module translates button and joystick inputs sensitively into the device from the remote steering unit, allowing highly accurate movements, including rotation, retraction, advancement, and instrument changes during the operation, with increments as fine as 1 mm. Physicians have access to three joysticks, an X-ray pedal, and a tableside touchscreen with an interface OS for seamless control of the CorPath system. Ultra-high-resolution monitors with audible feedback for hemodynamics and fluoroscopy enable real-time visualization of parameters. The “Rotate on Retract” option facilitates more feasible navigation to designated areas by automatically rotating the catheter during the retraction process. Additionally, a highly-precise measurement feature allows for accurate lesion size analysis.
Moreover, the device can perform angiogram procedures, including three-dimensional angiograms, with the installation of a power injector and wireless steering pedal. In this configuration, operators can manipulate guidewires with one hand and perform contrast injection with the second hand.
Another device applied to neuroendovascular surgeries is the Magellan Robotic System, developed by Hansen in CA, USA, which is a remote-surgery workstation equipped with the 6F NorthStart Robotic Catheter. Originating from the Sensei X robotic catheter system, this upgraded device, akin to the CorPath GRX, can be remotely controlled by the operator in a separate room. The operator utilizes a 3D hand-operated joystick, Instinctive Motion Controller, and a monitor to steer the device, thus reducing radiation exposure. The remote robotic catheter boasts a remarkable ability for 180-degree multi-directional articulation from the joystick, featuring seven degrees of freedom. This capability allows for the high accuracy in various interventional procedures[7,8]. The operator deck is equipped with a monitor that displays fluoroscopic and vector position imaging, facilitating precise vessel navigation and orientation. Additionally, the catheter can be passively retracted through the Auto Retract feature while leaving the guidewire in the same position.
Robotic assistance in CAS surgeries is increasingly prevalent on a global scale. However, despite growing interest in this domain, a comprehensive, systematic review dedicated exclusively to this subject is notably absent. While Crinnion et al. have delineated neurosurgical interventions, including CAS procedures, our study aims to provide an exclusive focus on this specific topic, presenting an updated perspective[9]. This review endeavors not only to synthesize current literature detailing robotic applications by presenting the effectiveness of neuroendovascular interventions, but also to delineate the limitations of existing devices and propose future perspectives, thereby offering a roadmap for the continued evolution of such robotic surgical devices.
METHODS
To conduct this comprehensive systematic review, we adhered to the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) guidelines[10]. We have chosen five databases: PubMed, Cochrane Library, Web of Science, Embase, and Scopus. The inclusion of Medical Subject Headings (MeSH) terms, such as carotid artery stenosis, carotid artery stenting, and various synonyms of robot-related terminology (robot, robot-assisted, robotic), facilitated a search strategy, the details of which are available in the Appendix. No search filters (publication date, article type, or language) were imposed on the search engine. Furthermore, a supplementary manual search was conducted, tracking references and websites for studies that might have eluded detection during the database search.
The screening process was conducted independently by the authors, utilizing the Zotero Bibliography Manager software. Disagreements were resolved with the third author. A set of exclusion and inclusion criteria was devised for this review. Inclusion criteria encompassed original works with full-text availability in the English language, focusing specifically on robot-assisted endovascular carotid artery stenting (CAS) surgery. Conversely, abstract-only articles, reviews, editorials, technical descriptions, and other non-original articles were not included in this synthesis. Additionally, in vitro, ex vivo, and non-human in vivo studies were excluded.
Upon completion of the eligibility assessment, two authors independently extracted data from each included study. The aim of this review was to discuss the effectiveness, hence procedure time, and the complications were the main extracted parameters. Additionally, the data collection process encompassed details such as the country of origin of the study, the number and demographics of patients, access site, mean fluoroscopy time, contrast dose, mean radiation dose, and stenosis characteristics. Mean values of operation, fluoroscopy time, and radiation dose were calculated if sufficient data were provided. Any conflicts arising during the extraction process were resolved through mutual agreement among all authors, ensuring the robustness and accuracy of the extracted data.
Each study was individually assessed using QUADAS-2 risk of publication bias tool in four domains: patient selection, index test, reference standard, and flow & timing[11]. GRADE tool was used to determine the quality of evidence of studies[12].
RESULTS
On December 30, 2023, a literature search was conducted across five databases. The results yielded 40 articles on PubMed, 2 on the Cochrane Library, 42 on Web of Science, 87 on Embase, and 28 on Scopus, totaling 199 articles. Initial assessment with Zotero bibliography software identified 86 duplicate works, which were promptly removed before the initiation of the screening process. None of the articles were deemed ineligible for reasons other than duplication.
For the subsequent screening phase, two authors independently evaluated 113 works. This led to the exclusion of 79 articles that proved irrelevant to the synthesis's thematic focus. Thirty-four articles underwent further eligibility assessment, culminating in the inclusion of seven original investigations[13-19]. Among the 27 excluded works, the rationale for exclusion encompassed five non-in-human studies, six review articles, one video report, 14 abstract-only studies, and one angiography trial. The search strategy process is visually presented in Figure 2, using the PRISMA flow diagram template[10].
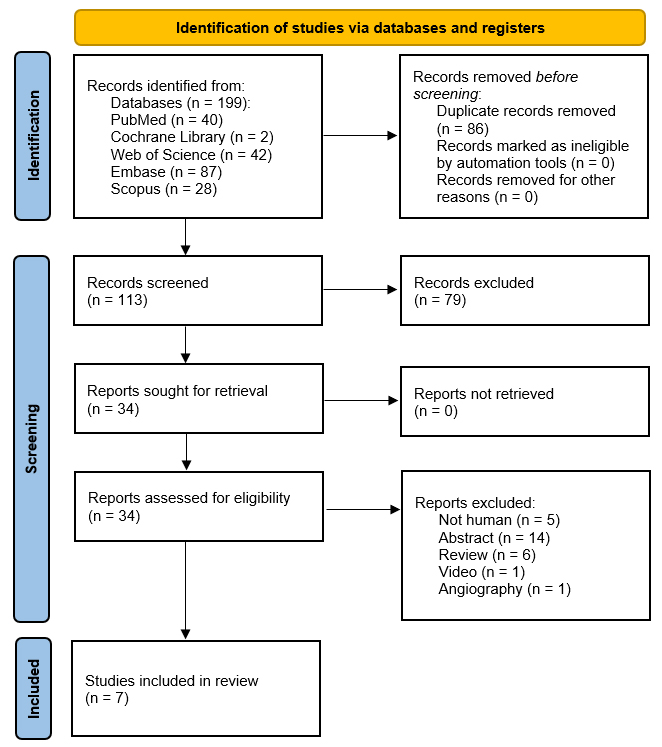
Figure 2. PRISMA flow diagram. PRISMA: Preferred Reporting Items for Systematic Reviews and Meta-Analyses.
From the seven included studies, the majority (6/7) employed the CorPathGRX robotic system, with one study utilizing the Magellan robotic system. The Magellan study was conducted in the UK, while the remaining six originated in the USA. A total of 44 patients underwent carotid artery stenosis procedures with robotic assistance. Six studies have directly reported complications, involving three out of 41 patients: access site conversion, Angio-Seal device failure, and residual stenosis, one of each. Mean operation time varied from 34 to 85 min among the studies. Radial, femoral, and brachial access sites were used in the studies. Essential details such as the number of patients, their demographics, mean procedure time, fluoroscopy and radiation parameters, complications, and lesion characteristics are presented in
Characteristics of included studies
| Study | System | Patients | Mean procedure time (min) | Complications |
| Weinberg et al., USA 2020[13] | CorPath GRX | 6 | 85.0 ± 14.3 | Switch to transfemoral access (1) |
| Sajja et al., USA 2020[14] | CorPath GRX | 3 | 34.7 ± 5.9 | None |
| Jones et al., UK 2021[15] | Magellan | 13 | 74.7 (range 70-110) | Angio-Seal closure device failure (1) |
| Abbas et al., USA 2022[16] | CorPath GRX | 14 | 73.9 ± 14.4 | None |
| Nogueira et al., USA 2020[17] | CorPath GRX | 4 | N/A | 36% residual stenosis (1) |
| George et al., USA 2020[18] | CorPath GRX | 1 | 60 | None |
| Costa et al., USA 2022[19] | CorPath GRX | 3 | N/A, See CorPath subchapter | |
Patient demographics of included studies
| Study | Mean age, sex | Access | Mean fluoroscopy time (min) | Mean contrast dose and radiation | Other |
| Weinberg et al.[13] | 70.0 ± 7.2, female (1) | Radial | 30.5 ± 7.2 | 107.0 ± 29.1 mL, 98.7 ± 49.9 Gy cm2 | N/A |
| Sajja et al.[14] | N/A | Radial | 31.3 ± 4 | N/A | |
| Jones et al.[15] | 68.7, female (3) | N/A | N/A | 63 Gy.cm2 | Mean lesion length 21.5 ± 8.9 mm |
| Abbas et al.[16] | 72.5, female (3) | Radial (10), Femoral (4) | 26.9 ± 6.3 | 93.2 ± 27.7 mL, 40.6 ± 20.3 Gy/cm2 | Stenosis diameter 1.45 (0.8-1.8) mm |
| Nogueira et al.[17] | Patients in 60s (1), and 70s (3) | Femoral | N/A | N/A | N/A |
| George et al.[18] | Patient in 70s | Brachial | 13.5 | 110 mL, 214 mGy (total) | Lumen diameter 3 mm |
| Costa et al.[19] | N/A (only for the whole study - see main text) | ||||
Procedures applied in the studies
| Study | Angioplasty | Stent | Filter | Procedure |
| Weinberg et al.[13] | Balloon advance - RA; angioplasty procedure - manual; deflation - manual; removal - RA | Stent advance - RA; deployment - manual; removal - RA | Filter advance - RA; deployment - RA | Filter > angioplasty > stenting |
| Sajja et al.[14] | Balloon advance - RA; angioplasty procedure - manual; deflation - manual; removal - RA | Stent advance - RA; deployment - manual; removal - RA; | Filter advance - RA; deployment - RA | Filter > angioplasty > stenting |
| Jones et al.[15] | N/A | Stent advance - RA; deployment - RA | Filter advance - RA; deployment - RA | Filter > angioplasty > stenting > post-stent balloon dilation |
| Abbas et al.[16] | N/A | Angioplasty > stenting | ||
| Nogueira et al.[17] | Balloon advance - RA; angioplasty procedure - manual; deflation - manual; retracted - RA; removal - manual | Stent advance - manual | Filter advance - RA; deployment - RA; removal - RA | Filter > angioplasty > stenting > post-stent balloon dilation (cases 3 & 4) |
| George et al.[18] | Balloon advance - RA; post-stent balloon advance - RA | Stent advance - manual | Filter advance - RA; deployment - manual; removal - manual | Filter > angioplasty > stenting > post-stent balloon dilation |
| Costa et al.[19] | N/A | |||
With QUADAS-2, we have found that all studies possessed an overall high risk of bias, mainly due to issues in one or more domains: lack of any randomization for patient selection, no specific inclusion & exclusion criteria, lack of blinding in the index test, and unclear (unblinded or nonrandomized) or lack of reference standard for (manual or other technique) comparison. All included works overall presented very low GRADE quality of evidence, mainly due to an overall high risk of bias, lack of randomized control trials, and very small sample sizes (imprecision of the results).
CorPathGRX
Sajja et al. was one of the first studies implementing robotic assist (RA) procedures in CAS[14]. Their study included three patients undergoing this procedure with the use of the CorPath GRX system. A 6F guide catheter and 5F diagnostic catheter were manually advanced from the radial artery into the aortic arch. Synchro2 wire was RA advanced, and Spider FX filter was advanced over the wire and deployed in carotid artery. Balloon angioplasty was performed manually, and a carotid stent was advanced with the CorPath system and deployed manually. Finally, the catheter was removed with RA. No perioperative complications occurred, nor was there a conversion for a manual procedure in the CAS procedures; however, in the diagnostic (angiogram) only cases, three manual conversions were required. The authors noticed that the operation and the fluoroscopy time started improving with more operations performed. The mean operation time was 34.7 min.
Another one of the first studies conducting RA CAS surgery was the Nogueira et al. work[17]. They performed CAS interventions on four patients between November and December 2019. The surgeon received protocolized training and simulation interventions on 3D-printed silicone reconstruction. The training lasted until operators felt confident enough to perform real operations, and training took 2 h. The CorPathGRX system assisted in guidewire advancement into the carotid artery, insertion of a SpiderFX catheter with filter, and advancement of a balloon for angioplasty. Balloon inflation was done in a manual way. In two cases, additional stents were deployed due to the residual stenosis. No perioperative complications were noted; however, in one case, a 36% residual stenosis occurred. Authors have not reported mean operation time.
Weinberg et al. conducted a study to assess the efficacy of robotic-assisted versus manual CAS procedures[13]. Thirteen patients were included in the comparison; six of them underwent robotic procedures and seven underwent manual CAS operations. Approximately 20 s were needed to install devices into dispensable cassettes. There were no major technical complications; however, one surgery required a transfemoral access conversion due to the tortuous aortic arch. No complications were noted after the surgeries.
In the manually performed procedures, there were no perioperative complications; however, two operations required a switch to the transfemoral access site. No significant difference was found in contrast to fluoroscopy time, perioperative complications, radiation exposure, or access-site complications. However, procedure time was significantly (P = 0.0231) higher in operations performed with robot assistance
Abbas et al. performed a study with 14 patients undergoing RA CAS procedures - to the best of our knowledge, the study with the greatest number of participants[16]. Three surgeons have utilized the CorPath GRX system to perform surgeries. Ten patients were treated with a transradial approach, and the other four had transfemoral access. Precise Pro stent was used in all surgeries, and Aviator or Aviator Plus balloons were used for the angioplasty. The median procedure time was 70.5 min. Similarly to the Sajja study, Abbas et al. noticed a significant decrease in fluoroscopy (P = 0.002) and procedure time (P = 0.008) among three groups with different periods of time of surgery performed[16]. As more RA surgeries were performed, these statistics tended to generally improve. No major perioperative or technical complications were noticed. The median follow-up time was 90 days. One patient died four days after the procedure; however, this was unrelated to the surgery but rather the severity of the initial presentation. Nine patients, after 90 days, appeared on the final follow-up with favorable modified Rankin Scale scores.
Costa et al. have performed different RA procedures with the CorPath GRX system among 41 patients, including three CAS procedures, 37 diagnostic angiographies, and one transverse sinus stent placement[19]. In 27 cases, the femoral route was accessed to perform the procedure. While their study did not specify complications for CAS procedures, conversion to femoral access was required once. In seven cases, a conversion to a manual operation procedure was performed due to specific anatomy, insufficient length of catheter, and mechanical issues with the robotic arm. No perioperative complications were found. Their study also compared RA procedures to 49 manually performed. Total operation time was significantly longer with the use of the CorPath GRX system compared to manual procedures (median of 86 vs. 71 min, P < 0.01). However, no significant differences were found in fluoroscopy time, procedure time, or contrast dose. Similarly to previous studies, a learning curve effect resulted in procedure time being reduced.
George et al. have reported single case report with no operative complications, and procedure time of
Magellan robotic system
To date, only one study has implemented the Magellan Robotic System in CAS procedures. Jones et al. conducted thirteen CAS interventions between May 2015 and October 2016 with RA[15]. Targeted stenosis was manually crossed using a 0.014-inch wire. The deployment of the filter and stent for angioplasty was executed and advanced through the Magellan sheath. An angiography through the robotic device was performed to assess the operational success of the procedure. Technical and clinical success was achieved in all patients, even in challenging anatomical conditions, without any perioperative complications. However, there was one occurrence of Angio-Seal closure device failure, necessitating conventional surgical repair. The reported average procedure time was 74.7 min, and the required time for robotic setup was 5 min.
DISCUSSION
In this systematic review, we have presented an analysis of the current landscape of robot-assisted CAS procedures, with a particular focus on the CorPath GRX and Magellan Robotic System. The main findings from the included studies highlight the successful application of robotic assistance in carotid interventions, demonstrating promising outcomes in terms of technical feasibility, safety, and effectiveness. Only three complications were reported across six studies involving a total of 41 patients. None of these complications posed a threat to health, showcasing the safety of robotic CAS interventions.
Robotic systems, such as the CorPath GRX and Magellan Robotic System, offer a new approach in the field of carotid endovascular interventions. These technologies provide surgeons with enhanced precision, reduced radiation exposure, and the ability to perform complex maneuvers with increased accuracy.
Surgical robots are a way to introduce standardization while ensuring proper operation safety[20]. An added advantage stems from the fact that robots, unlike humans, are impervious to fatigue. This not only facilitates the continuous performance of lengthy operations but also safeguards the well-being of surgical staff by minimizing the risk of spine-related degeneration due to prolonged standing, which is known to increase the likelihood of lumbar injuries. Furthermore, orthopedic-related degeneration is minimized, as the operator can comfortably execute CAS surgeries from an ergonomically sound position. The advantages for the surgical staff extend further, as the robot can be steered from a shielded room, reducing radiation exposure. This not only lowers the risk of neoplasm incidence among staff but also eliminates the need for wearing heavy anti-radiation shielding.
While the reviewed studies generally reported positive outcomes, it is crucial to acknowledge potential risks associated with robotic-assisted CAS. The learning curve observed in multiple studies indicates that procedure times tend to decrease with increasing experience, implying an initial phase of adaptation. Complications such as conversion to manual procedures, access site issues, and technical challenges with the robotic systems were noted in some cases. Robotic devices are not compatible with all types of guide wires, limiting the potential for vascular interventions. Lack of haptic feedback among the current devices might be especially challenging for novice operators without sufficient experience in endovascular interventions. Additionally, we highlight the need for ongoing training and protocolized simulation with the use of Virtual Reality, Mixed Reality, ex-vivo models or phantoms to ensure operator confidence and competence.
Despite the promising results, there are hurdles to overcome for the large-scale implementation of robotic-assisted CAS. The studies included in this review indicated a high risk of bias in various domains, and very low quality of evidence was reported, primarily due to a lack of randomized control trials, small sample sizes, and potential issues with study design. Furthermore, the initial cost and resource investment in acquiring and implementing robotic systems pose financial challenges. Robotic systems are expensive, and the cost of the procedure can be higher than traditional CAS. This can be a barrier to adoption for some hospitals and healthcare systems. For example, CorPathGRX system costs 650,000$, and the single-use cassette - 650$. There is a lack of long-term data on the safety and efficacy of robotic CAS compared to traditional surgeon-performed CAS. This makes some surgeons and medical federations hesitant to adopt the new technology. Additionally, setting up a robotic system can be time-consuming, which would not be ideal in a critical situation where every second counts. Traditional surgery can often begin much quicker[13,19]. Surgeons can adapt their approach on the fly based on what they encounter during surgery. If a technical issue arises with the robot during surgery, troubleshooting could cause significant delays.
Standardization of training protocols, introduction of robotic CAS randomized control trials, and accumulating robust evidence through well-designed studies are essential steps for wider adoption of robotic technology. Future directions should address these limitations for the continued improvement of robotic systems. Additionally, the implementation of artificial intelligence techniques, such as deep learning or convolutional neural networks, holds great promise for enabling fully autonomous surgical procedures in the future[20]. Undoubtedly, the implementation of 5G and 6G speed networks will reduce the lag, allowing for highly accurate remote procedures.
Our review has limitations. The relatively small number of studies and patients included may restrict how broadly our findings can be applied. While our focus was on assessing clinical effectiveness, excluding non-human studies means we might miss insights into the development of newer technical features. Additionally, limitations in accessing databases from China, a country heavily involved in robotic technology research, raise the possibility that some relevant articles were missed.
In conclusion, the integration of robotic assistance in carotid interventions, as demonstrated by the CorPath GRX and Magellan Robotic System, holds significant promise in improving the precision and safety of CAS procedures. The reviewed studies present encouraging results, showcasing the potential for reduced radiation exposure, enhanced procedural efficiency, and successful clinical outcomes. However, the limited number of studies, the high risk of bias, and the need for further research and standardization highlight the evolving nature of this technology. The journey toward routine implementation requires addressing challenges, refining techniques, and building a robust body of evidence to support the efficacy and safety of robot-assisted carotid interventions.
As technology advances and research in this domain progresses, the potential for robotic assistance to become a standard tool in the armamentarium of endovascular operators appears promising, offering a pathway toward optimized patient outcomes in the management of carotid artery disease.
DECLARATIONS
Authors’ contributions
Concept, figure preparation: Łajczak PM
Screening, methodology, data extraction, manuscript writing, formal analysis: Łajczak PM, Jóźwik K
Supervision, manuscript revision: Nawrat Z
Availability of data and materials
All data used in this study were provided in the tables or text.
Financial support and sponsorship
None.
Conflicts of interest
Nawrat Z is Editorial Board Member of the journal Artificial Intelligence Surgery. Zbigniew Nawrat was not involved in any steps of editorial processing, notably including reviewers' selection, manuscript handling and decision making. The other authors declare that there are no conflicts of interest.
Ethical approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Copyright
© The Author(s) 2024.
REFERENCES
1. de Weerd M, Greving JP, Hedblad B, et al. Prevalence of asymptomatic carotid artery stenosis in the general population: an individual participant data meta-analysis. Stroke. 2010;41:1294-7.
2. Dossabhoy S, Arya S. Epidemiology of atherosclerotic carotid artery disease. Semin Vasc Surg. 2021;34:3-9.
3. Shah J, Vyas A, Vyas D. The history of robotics in surgical specialties. Am J Robot Surg. 2014;1:12-20.
4. Chitwood WR Jr, Wixon CL, Elbeery JR, Moran JF, Chapman WH, Lust RM. Video-assisted minimally invasive mitral valve surgery. J Thorac Cardiovasc Surg. 1997;114:773-80; discussion 780-2.
5. Damiano RJ Jr, Ehrman WJ, Ducko CT, et al. Initial United States clinical trial of robotically assisted endoscopic coronary artery bypass grafting. J Thorac Cardiovasc Surg. 2000;119:77-82.
6. Siemens Healthineers. University Hospital Giessen performs first minimally invasive, robotic-assisted coronary intervention in Germany. Available from: https://www.siemens-healthineers.com/press/releases/pr-corpath-pci-ukgm.html [Last accessed on 26 Apr 2024].
7. Perera AH, Riga CV, Monzon L, Gibbs RG, Bicknell CD, Hamady M. Robotic arch catheter placement reduces cerebral embolization during thoracic endovascular aortic repair (TEVAR). Eur J Vasc Endovasc Surg. 2017;53:362-9.
8. Riga CV, Cheshire NJ, Hamady MS, Bicknell CD. The role of robotic endovascular catheters in fenestrated stent grafting. J Vasc Surg. 2010;51:810-9; discussion 819-20.
9. Crinnion W, Jackson B, Sood A, et al. Robotics in neurointerventional surgery: a systematic review of the literature. J Neurointerv Surg. 2022;14:539-45.
10. Page MJ, McKenzie JE, Bossuyt PM, et al. The PRISMA 2020 statement: an updated guideline for reporting systematic reviews. BMJ. 2021;372:n71.
11. Whiting PF, Rutjes AW, Westwood ME, et al. QUADAS-2 Group. QUADAS-2: a revised tool for the quality assessment of diagnostic accuracy studies. Ann Intern Med. 2011;155:529-36.
12. Consumers and Communication Group resources for authors. Available from: https://cccrg.cochrane.org/author-resources [Last accessed on 26 Apr 2024].
13. Weinberg JH, Sweid A, Sajja K, et al. Comparison of robotic-assisted carotid stenting and manual carotid stenting through the transradial approach. J Neurosurg. 2020;135:21-8.
14. Sajja KC, Sweid A, Al Saiegh F, et al. Endovascular robotic: feasibility and proof of principle for diagnostic cerebral angiography and carotid artery stenting. J Neurointerv Surg. 2020;12:345-9.
15. Jones B, Riga C, Bicknell C, Hamady M. Robot-assisted carotid artery stenting: a safety and feasibility study. Cardiovasc Intervent Radiol. 2021;44:795-800.
16. Abbas R, Al Saiegh F, El Naamani K, et al. Robot-assisted carotid artery stenting: outcomes, safety, and operational learning curve. Neurosurg Focus. 2022;52:E17.
17. Nogueira RG, Sachdeva R, Al-Bayati AR, Mohammaden MH, Frankel MR, Haussen DC. Robotic assisted carotid artery stenting for the treatment of symptomatic carotid disease: technical feasibility and preliminary results. J Neurointerv Surg. 2020;12:341-4.
18. George JC, Tabaza L, Janzer S. Robotic-assisted balloon angioplasty and stent placement with distal embolic protection device for severe carotid artery stenosis in a high-risk surgical patient. Catheter Cardiovasc Interv. 2020;96:410-2.
19. Costa M, Tataryn Z, Alobaid A, et al. Robotically-assisted neuro-endovascular procedures: single-center experience and a review of the literature. Interv Neuroradiol. 2023;29:201-10.
Cite This Article
 , ... Zbigniew Nawrat
, ... Zbigniew NawratHow to Cite
Download Citation
Export Citation File:
Type of Import
Tips on Downloading Citation
Citation Manager File Format
Type of Import
Direct Import: When the Direct Import option is selected (the default state), a dialogue box will give you the option to Save or Open the downloaded citation data. Choosing Open will either launch your citation manager or give you a choice of applications with which to use the metadata. The Save option saves the file locally for later use.
Indirect Import: When the Indirect Import option is selected, the metadata is displayed and may be copied and pasted as needed.
About This Article
Special Topic
Copyright














Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at [email protected].