

Volume 4, Issue 4 (December, 2024) – 8 articles
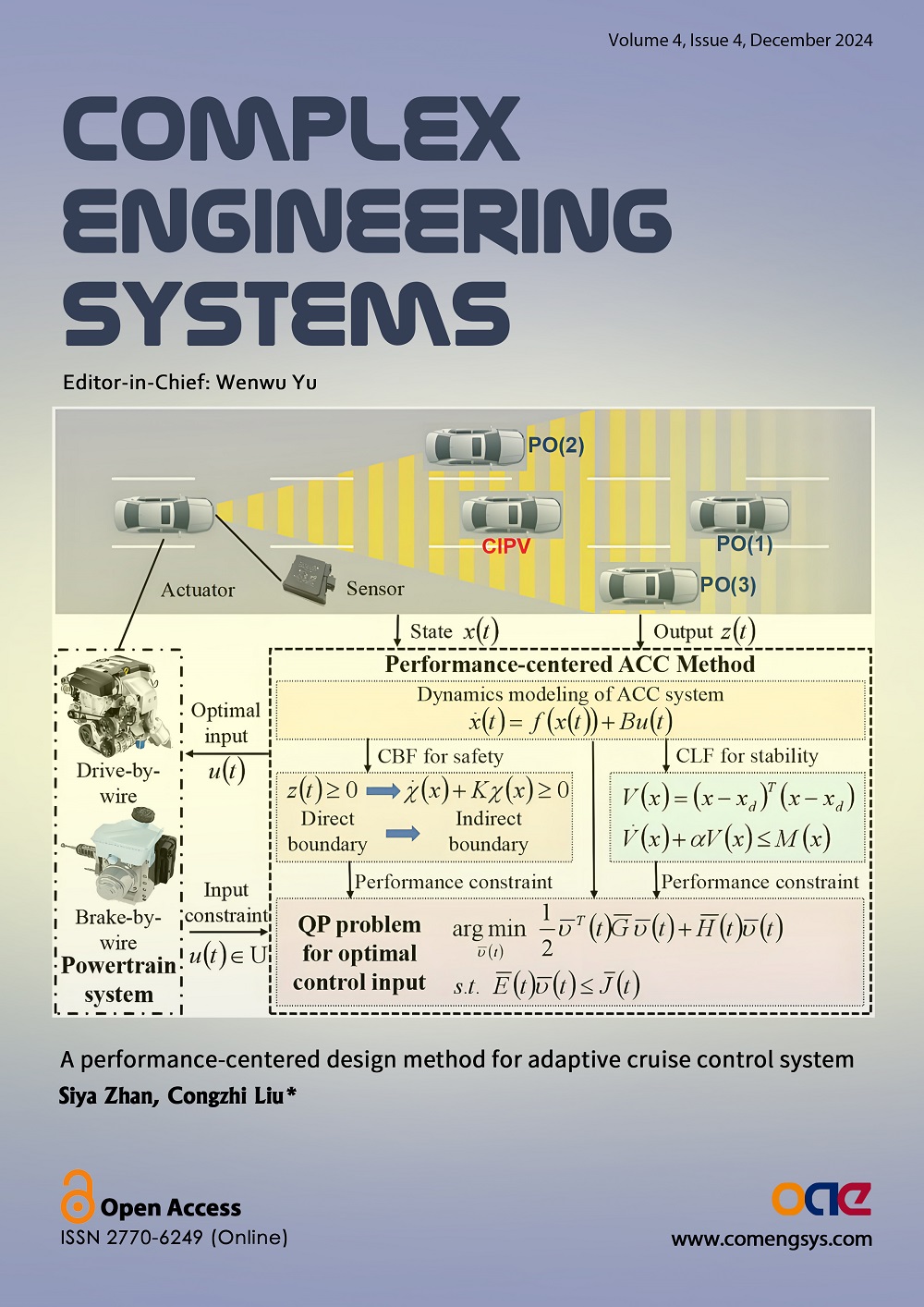
Cover Picture: This paper proposes a novel adaptive cruise control (ACC) design approach that integrates safety and comfort by transforming performance requirements into explicit control input and output constraints. A nonlinear vehicle longitudinal dynamics model is first established. Then, using a control barrier function (CBF) and a control Lyapunov function (CLF), the framework ensures driving safety and system stability. The resulting optimal control problem is formulated as a standard quadratic programming task to enforce predefined performance boundaries. Real-world experimental validation confirms that the proposed method achieves reliable and safe car-following behavior under practical conditions.
view this paper 



