

Volume 3, Issue 4 (December, 2023) – 7 articles
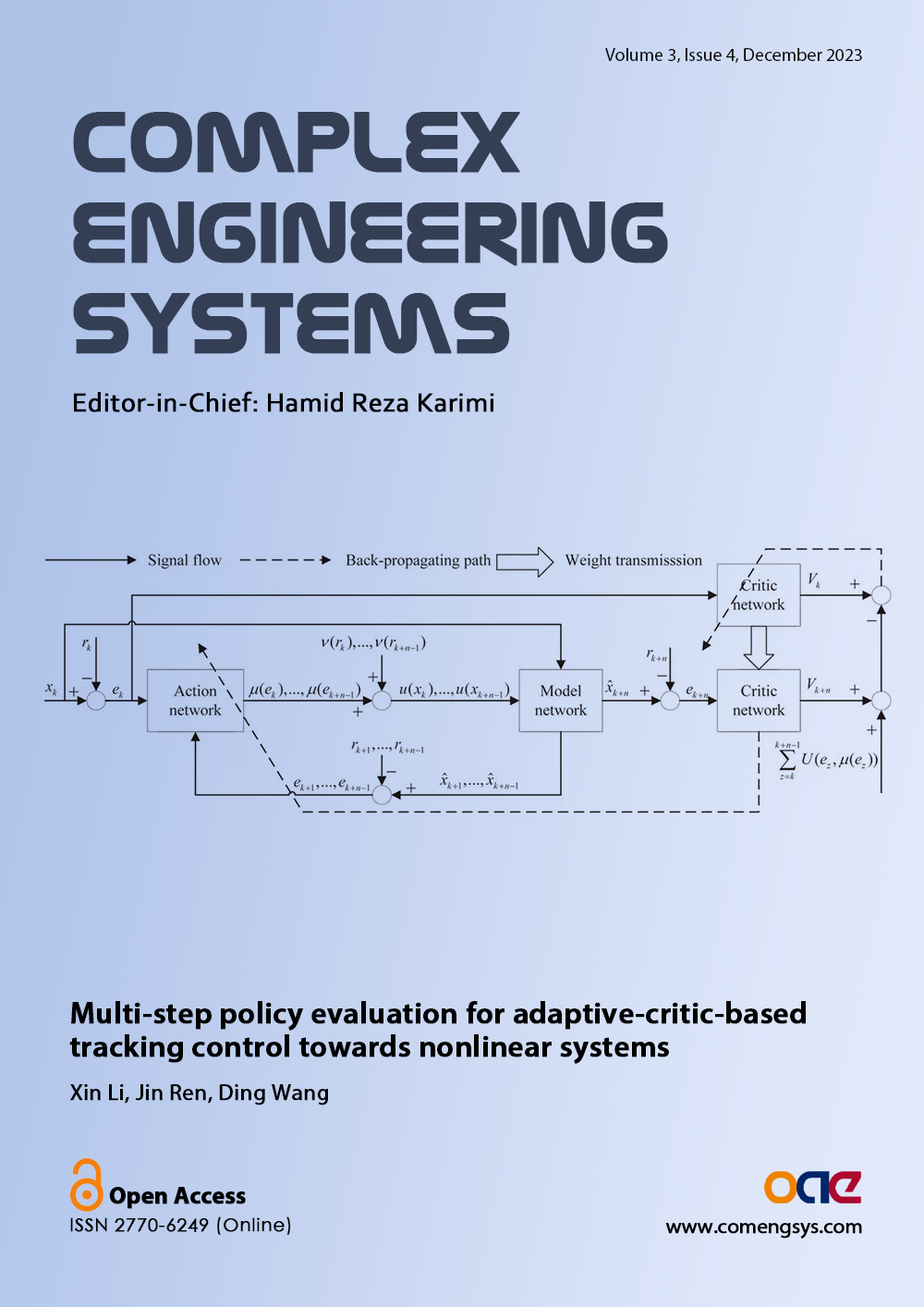
Cover Picture: Currently, there are a large number of tracking problems in the industry concerning nonlinear systems with unknown dynamics. In order to obtain the optimal control policy, a multi-step adaptive critic tracking control (MsACTC) algorithm is developed in this paper. By constructing a steady control law, the tracking problem is transformed into a regulation problem. The MsACTC algorithm has an adjustable convergence rate during the iterative process by incorporating a multi-step policy evaluation mechanism. The convergence proof of the algorithm is provided. In order to implement the algorithm, three neural networks are built, including the model network, the critic network, and the action network. Finally, two numerical simulation examples are given to verify the effectiveness of the algorithm. Simulation results show that the MsACTC algorithm has satisfactory performance in terms of the applicability, tracking accuracy, and convergence speed.
view this paper 



