

Improved impedance/admittance switching controller for the interaction with a variable stiffness environment


Abstract
Hybrid impedance/admittance control aims to provide an adaptive behavior to the manipulator in order to interact with the surrounding environment. In fact, impedance control is suitable for stiff environments, while admittance control is suitable for soft environments/free motion. Hybrid impedance/admittance control, indeed, allows modulating the control actions to exploit the combination of such behaviors. While some work has addressed the proposed topic, there are still some open issues to be solved. In particular, the proposed contribution aims: (i) to satisfy the continuity of the interaction force in the switching from impedance to admittance control when a feedforward velocity term is present; and (ii) to adapt the switching parameters to improve the performance of the hybrid control framework to better exploit the properties of both impedance and admittance controllers. The proposed approach was compared in simulation with the standard hybrid impedance/admittance control in order to show the improved performance. A Franka EMIKA panda robot was used as a reference robotic platform to provide a realistic simulation.
Keywords
1. INTRODUCTION
1.1. Context
Compliant control [1] has been widely employed to establish a stable and controlled interaction between a robot and the surrounding environment. While different implementations and approaches can be found in the state-of-the-art to deal with different applications [2-4], impedance and admittance controllers [5] are the most investigated strategies to deal with (partially) unknown environments [6-8]. While impedance control is suitable to control the interaction between the robot and a stiff environment, admittance control performs better when the robot interacts with a soft environment [9]. Indeed, a control framework capable of combining both controllers would improve the interaction control performance. It would allow switching between the right behavior for the interaction control considering soft environments (or free motion phases, in which the environment stiffness can be considered null) and for the interaction control considering stiff environments. Even though the modulation of such control behaviors has been addressed by the variable impedance control (i.e., to tune the controller parameters to deal with different environments/task phases [10, 11]), hybrid control frameworks have also been developed to combine the capabilities of both impedance and admittance controllers. In the following, the state-of-the-art hybrid controllers are analyzed to highlight the related open issues.
1.2. Related works
The complementary performance of impedance and admittance controllers is qualitatively shown in Figure 1. A hybrid controller that combines the behaviors of both impedance and admittance control would result in improved interaction control performance and would allow implementing a generalized interaction controller capable of dealing with any interaction environment.

Figure 1. Qualitative complementarity of impedance and admittance controllers performance.
Ott et al.[12] summarized the hybrid control framework in [12, 13], which enhances the performance of interaction control in the whole spectrum of environment stiffness values. The proposed approach consists of applying the impedance and admittance controllers alternatively by exploiting a switching mechanism defined by a switching period parameter
1.3. Paper Contribution
Based on the discussion provided in the previous section, the main goals of the proposed paper are as follows:
(i) Satisfy the continuity of the interaction force in switching from impedance to admittance control when a feedforward velocity term is present.
(ii) Adapt the switching parameters to improve the performance of the hybrid control framework, thus better exploiting the properties of both impedance and admittance controllers.
While Aim (i) is addressed by the definition of proper initialization conditions at the switching time from impedance to admittance control taking into account a feedforward velocity term; Aim (ii) is addressed by adapting the switching parameters on the basis of the resulting robot inertia parameter (for the adaptation of the switching parameter
The implemented methodologies were evaluated in simulation in Matlab, making use of a Franka EMIKA panda robot as a reference robotic platform, comparing the achieved results with respect to the standard method, which uses
1.4. Paper outline
The paper is structured as it follows. Section 2 describes the hybrid controller of Ott et al.[13], together with the low-level controller (i.e., impedance and admittance controllers). Section 3 introduces the modified hybrid control framework in order to deal with the discussed open issues of the state-of-the-art. Section 4 shows the achieved results of the proposed modified hybrid controller with respect to the one using
2. HYBRID IMPEDANCE–ADMITTANCE CONTROLLER
Impedance and admittance controllers are two well-known strategies that are used to assign a specified dynamic behavior to a robot interacting with the surrounding environment. Both controllers aim to impose a target dynamic behavior on the controlled manipulator, as described by the following expression [19]:
where
While impedance control is exploited in the interaction with stiff environments, admittance control is exploited in the interaction with soft environments (or in the case of free-motion tasks). Hybrid controllers, therefore, aim to combine the performance of both strategies to unify their behaviors into one control strategy, suitable for all interaction conditions.
In the following, the definition of impedance and admittance controllers is recalled, together with the definition of the hybrid controller.
2.1. Robot dynamics modeling and control design
To design the impedance and admittance controllers, the robot dynamics can be modeled as follows [19]:
where
where
2.2. Impedance control
The Cartesian impedance control can be defined as it follows [19]:
where
2.3. Admittance control
The admittance control generates a position reference
where
where
2.4. Hybrid impedance/admittance control
The hybrid impedance/admittance control can be implemented on the basis of the approach proposed by Ott et al.[12], so that it would be possible to exploit the combined performance of both control schema to deal with a wide range of interaction environment stiffnesses. The proposed hybrid controller continuously switches between impedance and admittance control. For this purpose, the switching period
where
In Equation (11),

Figure 2. Hybrid impedance/admittance control schema.
While the hybrid impedance/admittance control proposed by Ott et al.[13] provides a useful control framework to combine the impedance control and admittance control performance, the following main open issues are still present in the state-of-the-art: (i) the switching law to ensure continuity in the switching from impedance to admittance control does not include a feed-forward velocity term; and (ii) the performance of the hybrid impedance/admittance control framework (i.e., the resulting combined impedance/admittance behavior) can be improved by adapting the switching parameters that were considered constant by Ott et al.[13]. In the following section, these open issues are tackled to improve the hybrid impedance/admittance control framework.
3. ADAPTIVE SWITCHING PARAMETERS
In this section, two main improvements are proposed for the hybrid impedance/admittance controller proposed in [13]: (i) proper initialization of
3.1. Proper initialization of the admittance controller
To guarantee the continuity of the interaction force while switching from impedance control to admittance control within the hybrid controller, the proper initialization of
3.1.1. Algebraic switching method
To guarantee the continuity of the interaction force while switching from impedance control to admittance control, the following equality has to be satisfied:
By isolating
By differentiating Equation (13), it is possible to compute
3.1.2. Differential switching method
By isolating
By taking its time derivative, it is possible to compute
Equations (15) and (16) can be integrated while impedance control is activated, in order to compute
3.1.3. Iterative switching method
Equation (12) shows that there are infinite combinations of
Iterative switching method algorithm.
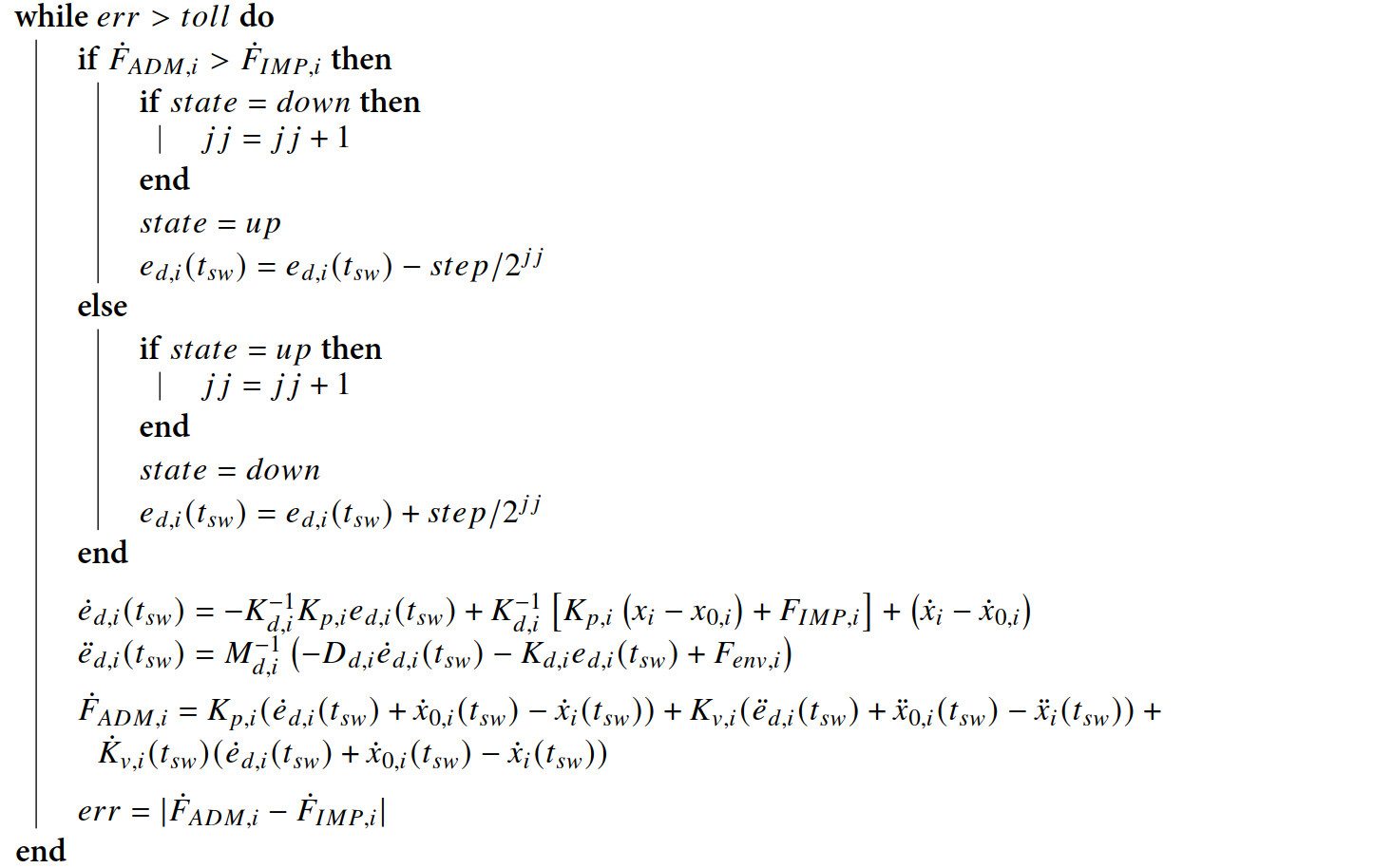 |

Figure 3. Convergence of the proposed iterative switching method considering the error

Figure 4. Switching iteration for the given tolerance value on
3.2. Adaptive switching logic
The switching logic is defined by the following two parameters: the switching period

Figure 5. Cartesian equivalent inertia

Figure 6. Hybrid control performance on the basis of the switching parameter
In the following, the adaptation of both the switching period
3.2.1. Variable switching period $$ \delta $$
To tune the switching period
where
To tune the
where
for a given interaction environment
By simulating the interaction with different environments (i.e., having different stiffness) and values of the duty cycle
To evaluate the cost function
Figure 7 shows the cost functions

Figure 7. Contributions to the cost function for the soft, medium, and stiff environments, considering an inertia parameter

Figure 8. Normalized cost functions for soft, medium, and stiff environments and total normalized cost. The minimum for every value of the inertia

Figure 9.
It has to be noted that the optimized value of
3.2.2. Variable duty cycle $$ n $$
The adaptation of the duty cycle parameter
This means that, when interacting with a soft environment (i.e.,

Figure 10. Adaptation law for

Figure 11. Proposed adaptation law for
Remark 1. The environment stiffness parameter
Remark 2. The stability of the controller can be addressed following the work in [12, 13].
4. RESULTS
In this section, the results achieved by the proposed improved hybrid impedance/admittance controller are discussed, comparing them with the standard methodology where
4.1. Task description
To evaluate the performance of the improved hybrid controller, an interaction task along the vertical Cartesian direction

Figure 12. Variable environment stiffness
4.2. Control parameters definition
The parameters for the impedance controller were chosen as follows:
The diagonal elements of the matrix
The parameters of the admittance controller were imposed as follows:
where
The values used in Equation (17) were imposed as in the following:
4.3. Results evaluation
The performance obtained when applying the hybrid control with the algebraic, differential, and iterative switching methods can be seen in Figure 13a, 13c, 13e, respectively, considering fixed and variable

Figure 13. Hybrid control performance comparison considering fixed

Figure 14. Variable

Figure 15.

Figure 16. Comparison of the old and new adaptation strategies of
5. CONCLUSIONS AND FUTURE WORK
This paper addresses two open issues present in state-of-the-art (i.e., satisfying the continuity of the interaction force in the switching from impedance to admittance control when a feedforward velocity term is present and adapting the switching parameters to improve the performance of the hybrid control framework, better exploiting the properties of both impedance and admittance controllers) to improve the hybrid impedance/admittance control performance in the execution of interaction tasks. The modified methodology's performance (i.e., to verify the improved combined impedance/admittance behavior) was evaluated in simulation, comparing the achieved results with those obtained with the standard method that used
Future work is devoted to the design of a hybrid impedance/admittance controller exploiting AI techniques to additionally implement motion/force control capabilities (such as in Xu et al.[23, 24]). Furthermore, AI techniques will be applied to improve the switching strategy, together with embedding the online estimation of both the robot and the environment modeling into the hybrid control framework.
DECLARATIONS
Authors' contributions
Made substantial contributions to conception and design of the study and performed data analysis and interpretation: Roveda L, Formenti A
Performed data acquisition, as well as provided administrative, technical, and material support: Formenti A, Roveda L, Shahid AA, Piga D, Bucca G
Paper writing: Roveda L, Formenti A, Shahid AA
Supervision: Piga D, Bucca G
Availability of data and materials
Not applicable.
Financial support and sponsorship
The work has been developed within the project ASSASSINN, funded from H2020 CleanSky 2 under grant agreement n. 886977.
Conflicts of interest
All authors declared that there are no conflicts of interest.
Ethical approval and consent to participate
Not applicable.
Consent for publication
All the authors accept to publish the paper.
Copyright
© The Author(s) 2022.
REFERENCES
1. Schumacher M, Wojtusch J, Beckerle P, von Stryk O. An introductory review of active compliant control. Robotics and Autonomous Systems 2019;119:185-200.
2. Lefebvre T, Xiao J, Bruyninckx H, De Gersem G. Active compliant motion: a survey. Advanced Robotics 2005;19:479-99.
3. Calanca A, Muradore R, Fiorini P. A review of algorithms for compliant control of stiff and fixed-compliance robots. IEEE/ASME Trans Mechatron 2015;21:613-24.
4. Zhang T, Du Q, Yang G, et al. A review of compliant control for collaborative robots. In: 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA). IEEE; 2021. pp. 1103-8.
5. Hogan N. Impedance control: an approach to manipulation. In: 1984 American Control Conference; 1984. pp. 304-13.
6. Roveda L, Pedrocchi N, Tosatti LM. Exploiting impedance shaping approaches to overcome force overshoots in delicate interaction tasks. Int J Adv Robot Syst 2016;13:1729881416662771.
7. Roveda L, Pedrocchi N, Beschi M, Tosatti LM. High-accuracy robotized industrial assembly task control schema with force overshoots avoidance. Control Engineering Practice 2018;71:142-53.
8. Roveda L, Piga D. Robust state dependent riccati equation variable impedance control for robotic force-tracking tasks. Int J Intell Robot Appl 2020;4:507-19.
9. Hogan N. On the stability of manipulators performing contact tasks. IEEE J Robot Automat 1988;4:677-86.
10. Roveda L, Iannacci N, Vicentini F, et al. Optimal impedance force-tracking control design with impact formulation for interaction tasks. IEEE Robot Autom Lett 2016;1:130-36.
11. Schindlbeck C, Haddadin S. Unified passivity-based cartesian force/impedance control for rigid and flexible joint robots via task-energy tanks. In: 2015 IEEE international conference on robotics and automation (ICRA). IEEE; 2015. pp. 440-47.
12. Ott C, Mukherjee R, Nakamura Y. Unified impedance and admittance control. In: 2010 IEEE International Conference on Robotics and Automation; 2010. pp. 554-61.
13. Ott C, Mukherjee R, Nakamura Y. A hybrid system framework for unified impedance and admittance control. J Intell Robot Syst 2015;78:359-75.
14. Cavenago F, Voli L, Massari M. Adaptive hybrid system framework for unified impedance and admittance control. J Intell Robot Syst 2018;91:569-81.
15. Mei C, Yuan J, Guan R. Adaptive unified Impedance and Admittance control using online environment estimation. In: 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO); 2018. pp. 1864-69.
16. Izadbakhsh A, Kheirkhahan P, Khorashadizadeh S. FAT-based robust adaptive control of electrically driven robots in interaction with environment. Robotica 2018;12;37:1-22.
17. Yang B, Zhai DH, Lyu W, Xia Y. Event-based hybrid impedance and admittance control. In: 2019 Chinese Control Conference (CCC); 2019. pp. 4596-601.
18. Fu L, Wu R, Zhao J. On the stability of maxwell model based impedance control and cartesian admittance control implementation. In: 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM); 2019. pp. 793-98.
19. Siciliano B, Villani L. Robot force control. vol. 540 Springer Science & Business Media; 2012.
20. Gaz C, Cognetti M, Oliva A, Robuffo Giordano P, De Luca A. Dynamic identification of the franka emika panda robot with retrieval of feasible parameters using penalty-based optimization. IEEE Robot Autom Lett 2019;4:4147-54.
21. Roveda L, Vicentini F, Tosatti LM. Deformation-tracking impedance control in interaction with uncertain environments. In: 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems; 2013. pp. 1992-97.
22. Roveda L, Shahid AA, Iannacci N, Piga D. Sensorless optimal interaction control exploiting environment stiffness estimation. IEEE Trans Contr Syst Technol 2022;30:218-33.
23. Xu Z, Li S, Zhou X, Zhou S, et al. Dynamic neural networks for motion-force control of redundant manipulators: an optimization perspective. IEEE Trans Ind Electron 2021;68:1525-36.
Cite This Article

How to Cite
Download Citation
Export Citation File:
Type of Import
Tips on Downloading Citation
Citation Manager File Format
Type of Import
Direct Import: When the Direct Import option is selected (the default state), a dialogue box will give you the option to Save or Open the downloaded citation data. Choosing Open will either launch your citation manager or give you a choice of applications with which to use the metadata. The Save option saves the file locally for later use.
Indirect Import: When the Indirect Import option is selected, the metadata is displayed and may be copied and pasted as needed.
About This Article
Copyright














Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at [email protected].