
Volume 2, Issue 3 (September, 2022) – 5 articles
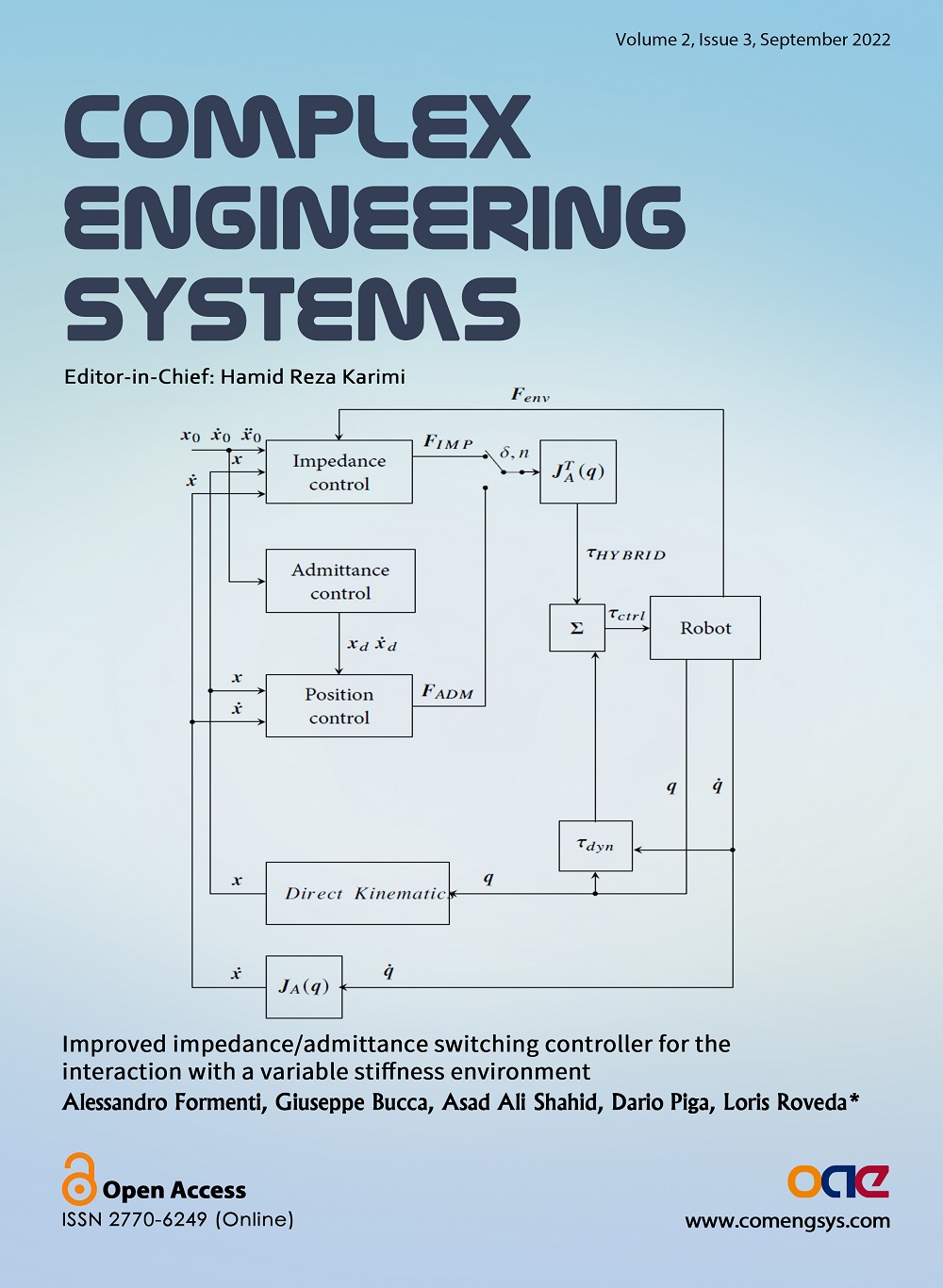
Cover Picture: Hybrid impedance/admittance control aims to provide an adaptive behavior to the manipulator in order to interact with the surrounding environment. In fact, impedance control is suitable for stiff environments, while admittance control is suitable for soft environments/free motion. Hybrid impedance/admittance control, indeed, allows modulating the control actions to exploit the combination of such behaviors. While some work has addressed the proposed topic, there are still some open issues to be solved. In particular, the proposed contribution aims: (i) to satisfy the continuity of the interaction force in the switching from impedance to admittance control when a feedforward velocity term is present; and (ii) to adapt the switching parameters to improve the performance of the hybrid control framework to better exploit the properties of both impedance and admittance controllers. The proposed approach was compared in simulation with the standard hybrid impedance/admittance control in order to show the improved performance. A Franka EMIKA panda robot was used as a reference robotic platform to provide a realistic simulation.
view this paper 


